Sample problem:
Q: A ball is thrown horizontally at a velocity of $5 \frac{\mathrm{m}}{\mathrm{s}}$ from a height of $1.5 \mathrm{~m}$. How far does the ball travel (horizontally)?
Answer/Explanation
A: We’re looking for the horizontal distance, $d_x$. We know the vertical distance, $d_y=1.5 \mathrm{~m}$, and we know that $v_{o, y}=0$ (there is no initial vertical velocity because the ball is thrown horizontally), and we know that $a_y=g=10 \frac{\mathrm{m}}{\mathrm{s}^2}$.
We need to separate the problem into the horizontal and vertical components.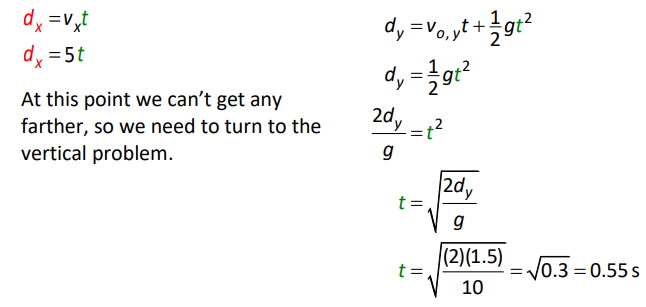
Now that we know the time, we can substitute it back into the horizontal equation, giving:
$
d_x=(5)(0.55)=2.74 \mathrm{~m}
$
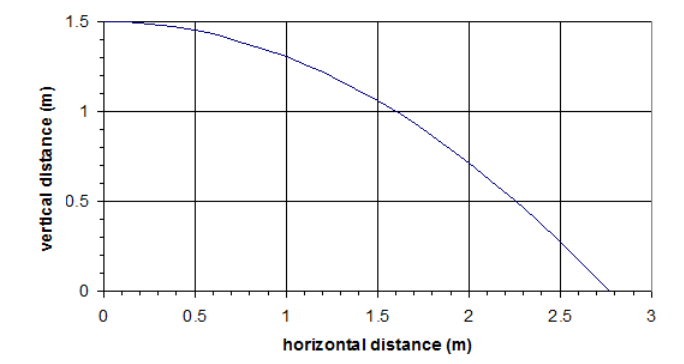
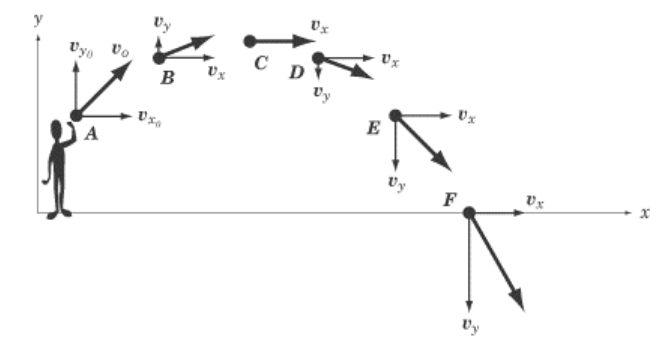
A graph of the vertical vs. horizontal motion of the ball looks like this:
Projectiles Launched at an Angle
If the object is thrown/launched at an angle, you will need to use trigonometry to separate the velocity vector into its horizontal $(x)$ and vertical $(y)$ components:
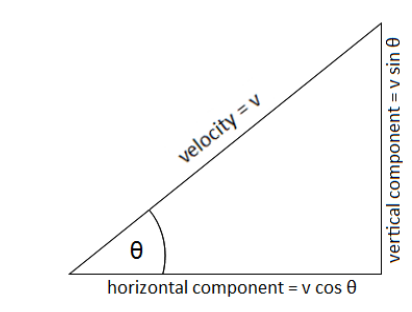
Thus:
– horizontal velocity $=v_x=v \cos \theta$
– $\quad$ initial vertical velocity $=v_{o, y}=v \sin \theta$
Note that the vertical component of the velocity, $v_y$, is constantly changing because of acceleration due to gravity:
A fact worth remembering is that an angle of 45° gives the greatest horizontal displacement.
What AP® Projectile Problems Look Like
$\mathrm{AP}^{\oplus}$ motion and acceleration problems almost always involve graphs or projectiles. Here is an example that involves both:
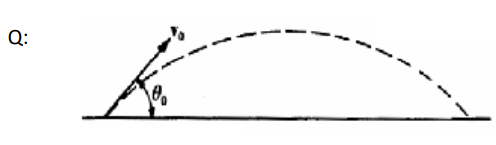
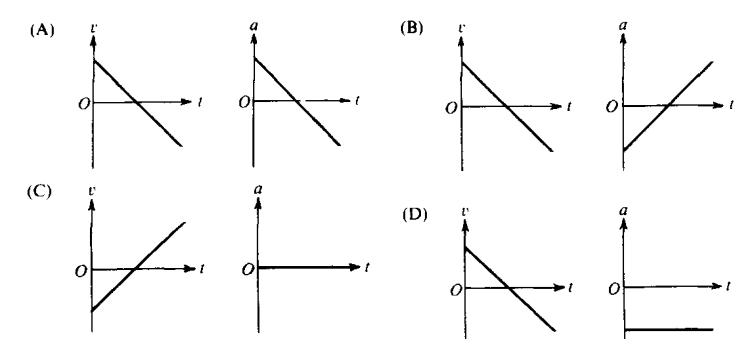
A projectile is fired with initial velocity $v_0$ at an angle $\theta_0$ with the horizontal and follows the trajectory shown above. Which of the following pairs of graphs best represents the vertical components of the velocity and acceleration, $v$ and $a$, respectively, of the projectile as functions of time t?
A: Because the object is a projectile:
•It can move both vertically and horizontally.
• It has a nonzero initial horizontal velocity. However, because the problem is asking about the vertical components, we can ignore the horizontal velocity.
•It has a constant acceleration of $-g$ (i.e., $g$ in the downward direction) due to gravity.
For each pair of graphs, the first graph is velocity vs. time. The slope, $\frac{\Delta v}{\Delta t}$, is acceleration. Because acceleration is constant, the graph has to have a constant. if we choose up to be the positive direction (which is the most common convention), correct answers would be (A), (B), and (D). If we choose down to be positive, only $(C)$ would be correct.
The second graph is acceleration vs. time. We know that acceleration is constant, which eliminates choices (A) and (B). We also know that acceleration is not zero, which eliminates choice (C). This leaves choice $(D)$ as the only possible remaining answer. Choice (D) correctly shows a constant negative acceleration, because the slope of the first graph is negative, and the $y$-value of the second graph is also negative.
A ball of mass $m$, initially at rest, is kicked directly toward a fence from a point that is a distance $d$ away, as shown above. The velocity of the ball as it leaves the kicker’s foot is $v_o$ at an angle of $\theta$ above the horizontal. The ball just clears the top of the fence, which has a height of $h$. The ball hits nothing while in flight and air resistance is negligible.
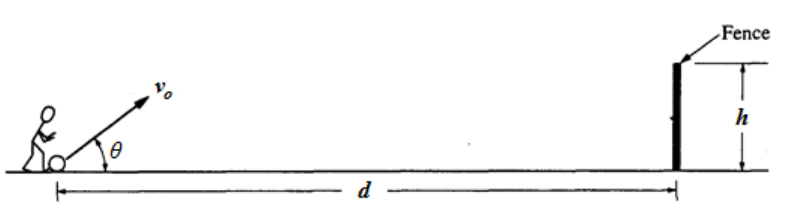
a. Determine the time, $t$, that it takes for the ball to reach the plane of the fence, in terms of $v_0, \theta, d$, and appropriate physical constants.
The horizontal component of the velocity is $v_h=v_o \cos \theta=\frac{d}{t}$.
Solving this expression for $t$ gives $t=\frac{d}{v_o \cos \theta}$.
Angular Motion, Speed and Velocity
Notes:
If an object is rotating (traveling in a circle), then its position at any given time can be described using polar coördinates by its distance from the center of the circle $(r)$ and its angle $(\theta)$ relative to some reference angle (which we will call $\theta=0$ ).
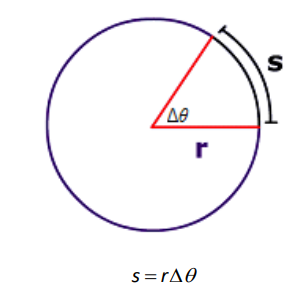
arc length $(s)$ : the length of an arc; the distance traveled around part of a circle.
angular velocity $(\omega)$ : the rotational velocity of an object as it travels around a circle, i.e., its change in angle per unit of time. (For purposes of comparison, the definition of angular velocity is presented along with its linear counterpart.)
$$
\begin{aligned}
& \overrightarrow{\boldsymbol{v}}=\frac{\overrightarrow{\boldsymbol{d}}}{t}=\frac{\Delta \overrightarrow{\boldsymbol{x}}}{\Delta t}=\frac{\overrightarrow{\boldsymbol{x}}-\overrightarrow{\boldsymbol{x}}_o}{t} \quad \overrightarrow{\boldsymbol{\omega}}=\frac{\Delta \overrightarrow{\boldsymbol{\theta}}}{\Delta t}=\frac{\overrightarrow{\boldsymbol{\theta}}-\overrightarrow{\boldsymbol{\theta}}_o}{t} \\
& \text { linear angular } \\
&
\end{aligned}
$$
In general, physicists use Greek letters for angular variables. The variable for angular velocity is the lower case Greek letter omega $(\omega)$. Be careful to distinguish in your writing between the Greek letter ” $\omega$ ” and the Roman letter “w”.
tangential velocity: the linear velocity of a point on a rigid, rotating body. The term tangential velocity is used because the instantaneous direction of the velocity is tangential to the direction of rotation.
To find the tangential velocity of a point on a rotating (rigid) body, the point travels an arc length of $s$ in time $t$. If angle $\theta$ is in radians, then $s=r \Delta \theta$. This means:
$$
\overrightarrow{\boldsymbol{v}}_{T, \text { ave. }}=\frac{\Delta \overrightarrow{\boldsymbol{s}}}{\Delta t}=\frac{r \Delta \overrightarrow{\boldsymbol{\theta}}}{\Delta t}=r \overrightarrow{\boldsymbol{\omega}}_{\text {ave. }} \quad \text { and therefore } \quad \overrightarrow{\mathbf{v}}_T=r \overrightarrow{\boldsymbol{\omega}}
$$
Centripetal Motion
Notes:
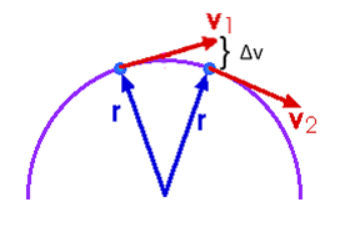
If an object is moving at a constant speed around a circle, its speed is constant, its direction keeps changing as it goes around. Because velocity is a vector (speed and direction), this means its velocity is constantly changing. (To be precise, the magnitude is staying the same, but the direction is changing.)
Because a change in velocity over time is acceleration, this means the object is constantly accelerating. This continuous change in velocity is toward the center of the circle, which means there is continuous acceleration toward the center of the circle.
centripetal acceleration $\left(a_c\right)$ : the constant acceleration of an object toward the center of rotation that keeps it rotating around the center at a fixed distance.
The equation ${ }^*$ for centripetal acceleration $\left(a_c\right)$ is:
$
a_c=\frac{v^2}{r}=\frac{(r \omega)^2}{r}=r \omega^2
$
(The derivation of this equation requires calculus, so it will not be presented here.)
Solving Linear & Rotational Motion Problems
Notes:
The following is a summary of the variables used for motion problems. Note the correspondence between the linear and angular quantities.
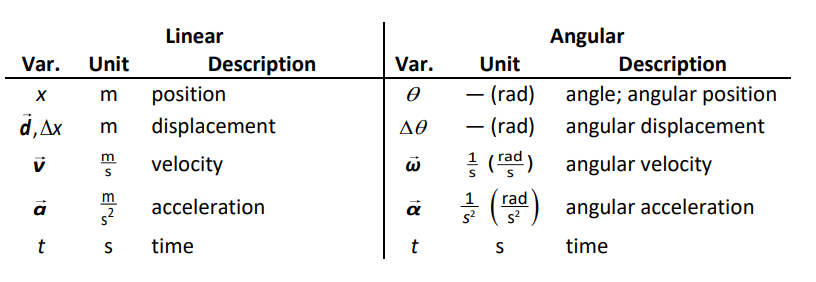
Notice that each of the linear variables has an angular counterpart.
Note that “radian” is not a unit. A radian is a ratio that describes an angle as the ratio of the arc length to the radius. This ratio is dimensionless (has no unit), because the units cancel. This means that an angle described in radians has no unit, and therefore never needs to be converted from one unit to another. However, we often write “rad” after an angle measured in radians to remind ourselves that the quantity describes an angle.
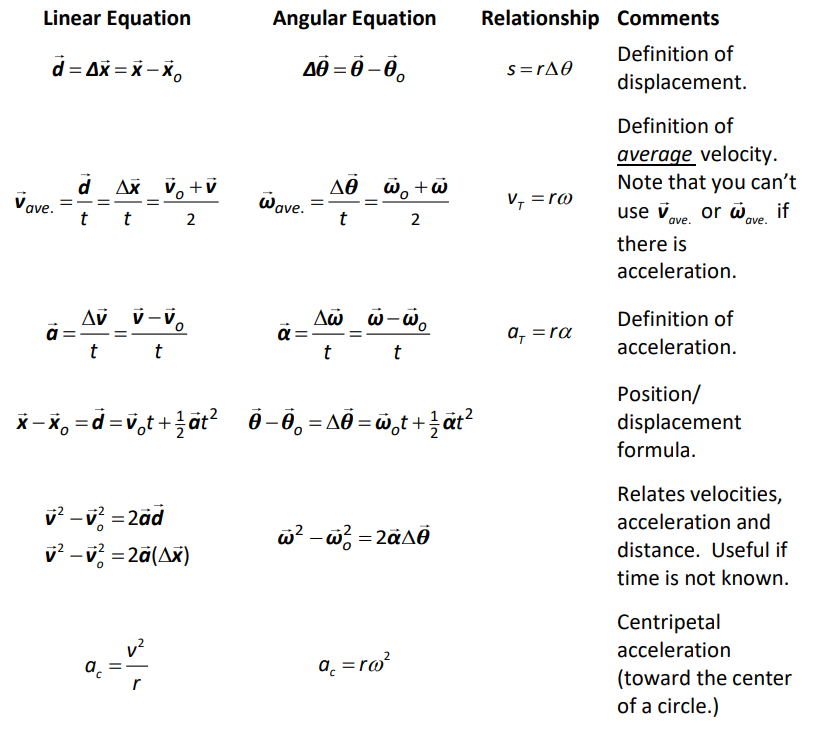
We have learned the following equations for solving motion problems. Again, note the correspondence between the linear and angular equations.
Note that vector quantities can be positive or negative, depending on direction.
Note that $\overrightarrow{\boldsymbol{r}}, \overrightarrow{\boldsymbol{\omega}}$ and $\overrightarrow{\boldsymbol{\alpha}}$ are vector quantities. However, the equations that relate linear and angular motion and the centripetal acceleration equations apply to magnitudes only, because of the differences in coordinate systems and changing frames of reference.
Selecting the Right Equation
(This is the same as the list from page 184 , with the addition of angular velocity.) When you are faced with a problem, choose an equation based on the following criteria:
•The equation must contain the variable you are looking for.
•All other quantities in the equation must be either given in the problem or assumed from the description of the problem.
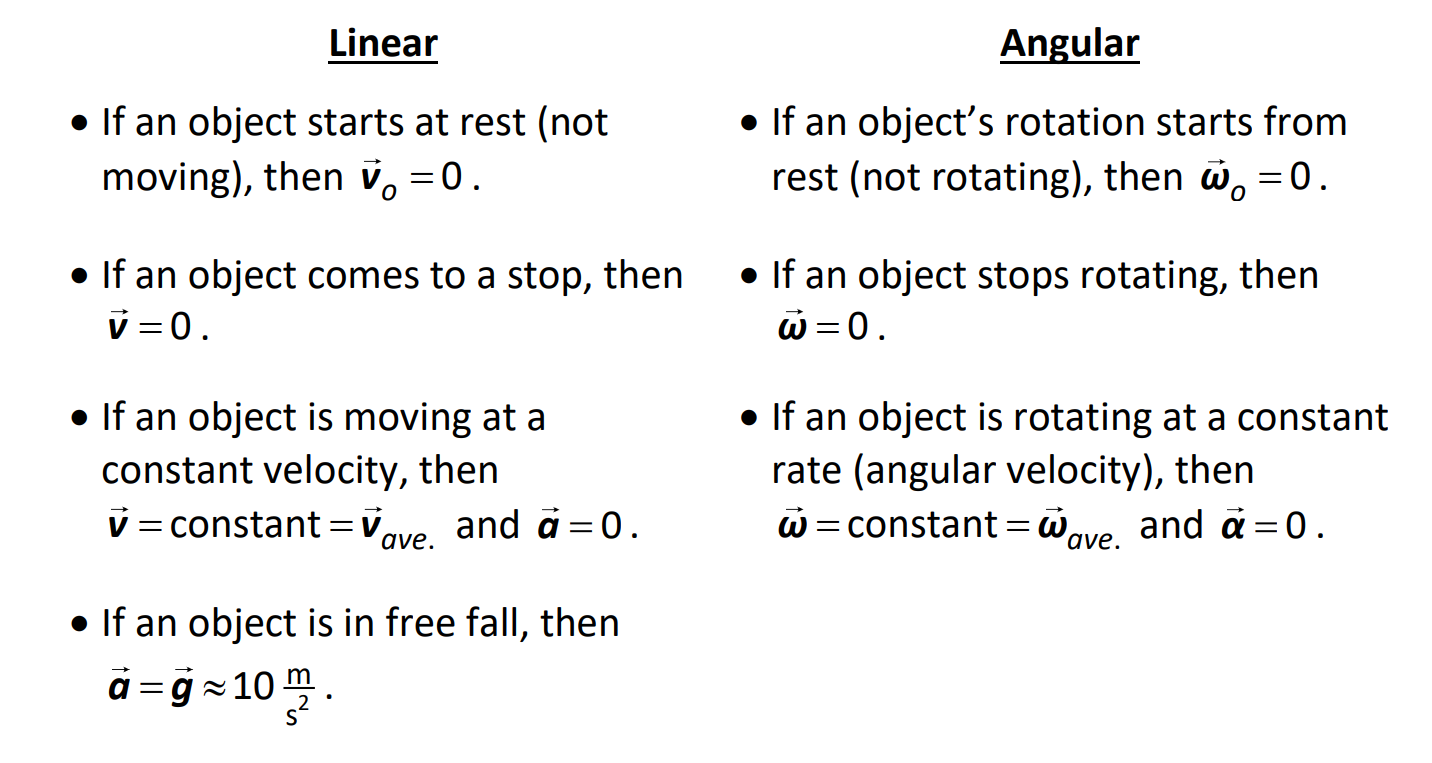
This means you can choose the appropriate equation by making a list of what you are looking for and what you know. The equation in which you know everything except what you are looking for is the one to use.