Topics covered in this chapter:
This chapter discusses the physics of simple harmonic (repetitive) motion.
• Simple Harmonic Motion (SHM) describes the concept of repetitive back-andforth motion and situations that apply to it.
• Springs and Pendulums describe specific examples of SHM and the specific equations relating to each.
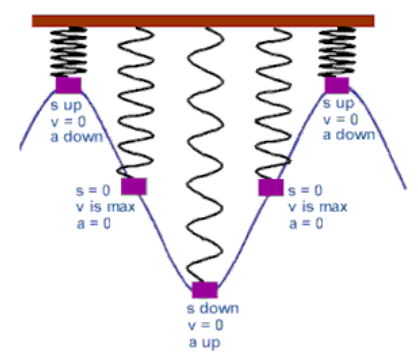
Examples of Simple Harmonic Motion
• Springs; as the spring compresses or stretches, the spring force accelerates it back toward its equilibrium position.
• Pendulums: as the pendulum swings, gravity accelerates it back toward its equilibrium position.
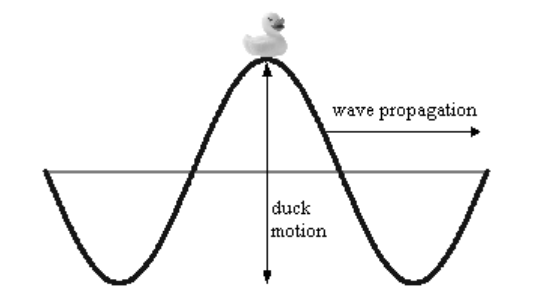
• Waves: waves passing through some medium (such as water or air) cause the medium to oscillate up and down, like a duck sitting on the water as waves pass by.
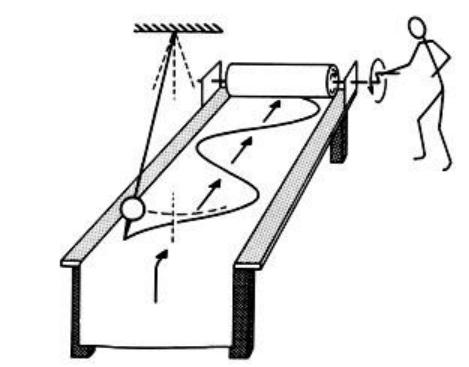
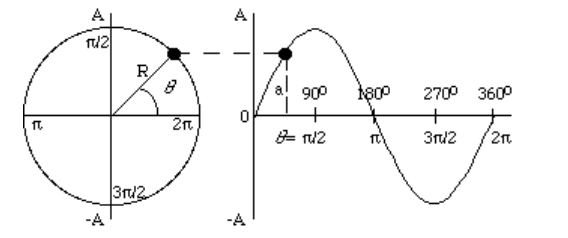
• Uniform circular motion: as an object moves around a circle, its vertical position (y -position) is continuously oscillating between +r and –r.
Springs
Notes:
spring: a coiled object that resists motion parallel with the direction of propagation of the coil.
Spring Force
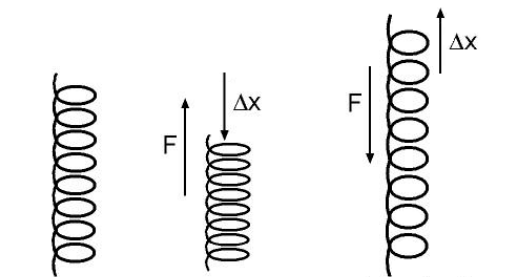
The equation for the force (vector) from a spring is given by Hooke’s Law, named for the British physicist Robert Hooke:
$
\overrightarrow{\boldsymbol{F}}_{\mathrm{s}}=-k \overrightarrow{\boldsymbol{x}}
$
Where $\overrightarrow{\boldsymbol{F}}_{\mathrm{s}}$ is the spring force (vector quantity representing the force exerted by the spring), $\overrightarrow{\boldsymbol{x}}$ is the displacement of the end of the spring (also a vector quantity), and $k$ is the spring constant, an intrinsic property of the spring based on its mass, thickness, and the elasticity of the material that it is made of.
The negative sign in the equation is because the force is always in the opposite (negative) direction from the displacement.
A Slinky has a spring constant of $0.5 \frac{\mathrm{N}}{\mathrm{m}}$, while a heavy garage door spring might have a spring constant of $500 \frac{\mathrm{N}}{\mathrm{m}}$.
Pendulums
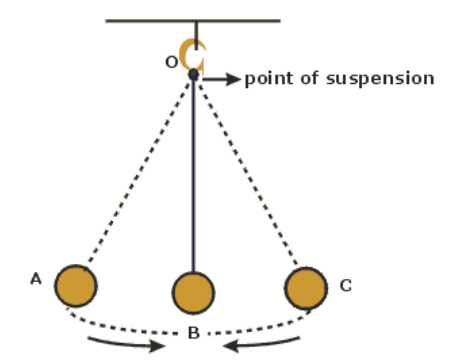
Notes: pendulum: a lever that is suspended from a point such that it can swing back and forth.
The Forces on a Pendulum
As the pendulum swings, its mass remains constant, which means the force of gravity pulling it down remains constant. The tension on the pendulum (which we can think of as a rope or string, though the pendulum can also be solid) also remains constant as it swings.

However, as the pendulum swings, the angle of the tension force changes. When the pendulum is not in the center (bottom), the vertical component of the tension is $F_{\mathrm{T}} \cos \theta$, and the horizontal component is $F_{\mathrm{T}} \sin \theta$. Because the angle is between $0^{\circ}$ and $90^{\circ}, \cos \theta<1$, which means $F_{\mathrm{g}}$ is greater than the upward component of $F_{\mathrm{T}}$. This causes the pendulum to eventually stop. Also because the angle is between $0^{\circ}$ and $90^{\circ}, \sin \theta>0$, This causes the pendulum to start swinging in the opposite direction.