Moment of Inertia Depends on Mass Distribution
The moment of inertia \( I \) is the rotational analogue of mass. It quantifies how difficult it is to change an object’s rotational motion about a given axis.
It depends on:
- The total mass of the object
- The distribution of that mass relative to the axis of rotation

Objects with mass further from the axis have a higher moment of inertia. For example:
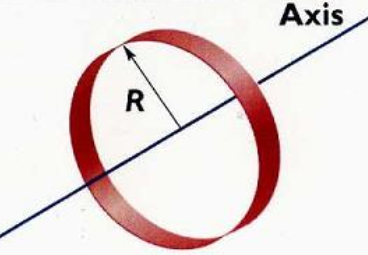
- A thin hoop has a larger \( I \) than a solid disk of the same mass and radius
The SI unit of moment of inertia is \( \text{kg·m}^2 \).
Note : We only have to remember the formula for the moment of inertia of a point mass
| Shape | Axis | Moment of Inertia \( I \) |
|---|---|---|
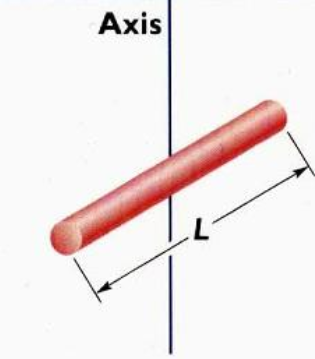
Thin Rod | About center, perpendicular to length | \( I = \frac{1}{12} mL^2 \) |
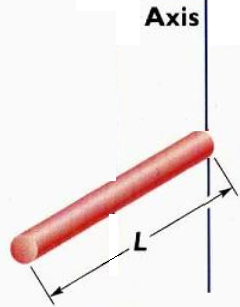
Thin Rod | About one end, perpendicular to length | \( I = \frac{1}{3} mL^2 \) |
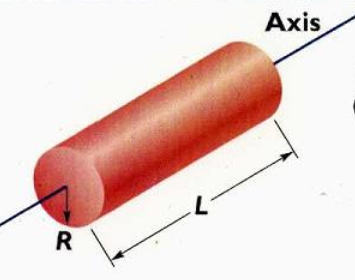
Solid Cylinder or Disk | About central axis (symmetry axis) | \( I = \frac{1}{2} mR^2 \) |
Hollow Cylinder | About central axis | \( I = mR^2 \) |
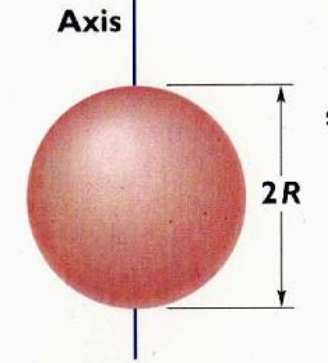
Solid Sphere | About diameter | \( I = \frac{2}{5} mR^2 \) |
Hollow Sphere | About diameter | \( I = \frac{2}{3} mR^2 \) |
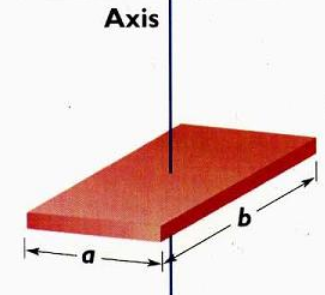
Rectangular Plate | About center, perpendicular to plane | \( I = \frac{1}{12} m(a^2 + b^2) \) |

Example:
Two objects of equal mass roll down a slope: a solid sphere and a hoop. Which one has greater moment of inertia, and which reaches the bottom first?
▶️ Answer/Explanation
Moment of Inertia:
Hoop: \( I = MR^2 \)
Sphere: \( I = \frac{2}{5}MR^2 \)
Conclusion:
The hoop has higher moment of inertia.
The sphere reaches the bottom first because more of its gravitational energy becomes translational KE, not rotational.
Moment of Inertia for a System of Point Masses
For a system of discrete point masses, the moment of inertia \( I \) about a fixed axis is calculated as:
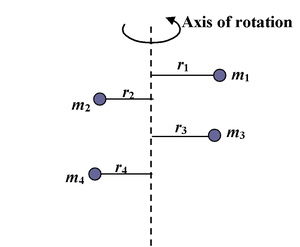
\( I = \sum mr^2 \)
Where:
- \( m \) = mass of each point particle
- \( r \) = perpendicular distance from the axis of rotation
This formula adds up the contribution of each particle’s mass multiplied by the square of its distance from the axis. The further the mass is from the axis, the greater its contribution to \( I \).
This principle also applies to continuous bodies, where integration replaces the summation.
Example:
Three point masses (2 kg, 3 kg, 5 kg) are located 1 m, 2 m, and 3 m from a fixed axis. Calculate the total moment of inertia of the system about the axis.
▶️ Answer/Explanation
Apply: \( I = \sum mr^2 \)
\( I = (2)(1^2) + (3)(2^2) + (5)(3^2) = 2 + 12 + 45 = \boxed{59 \, \text{kg·m}^2} \)
Newton’s Second Law for Rotation
Just as Newton’s Second Law relates net force to acceleration (\( F = ma \)), its rotational analogue relates net torque to angular acceleration:

\( \tau = I \alpha \)
Where:
- \( \tau \) = net torque acting on the body (N·m)
- \( I \) = moment of inertia of the body (kg·m²)
- \( \alpha \) = angular acceleration (rad/s²)
This equation shows that the angular acceleration is directly proportional to the torque and inversely proportional to the moment of inertia.
This law applies only when the torque and angular acceleration are measured about the same axis and the body is rigid.
Example:
A torque of 12 N·m is applied to a flywheel of moment of inertia \( 6.0 \, \text{kg·m}^2 \). What is its angular acceleration?
▶️ Answer/Explanation
Use: \( \alpha = \frac{\tau}{I} \)
\( \alpha = \frac{12}{6.0} = \boxed{2.0 \, \text{rad/s}^2} \)
The angular acceleration is 2.0 rad/s².