Contact Forces
1. Normal Force \( F_N \)
- This is the force exerted by a surface perpendicular (normal) to the surface, supporting an object resting on it.
- It prevents solid objects from passing through each other.
- If a body is on a horizontal surface with no vertical acceleration, then \( F_N = mg \).
- If other vertical forces act (like tension or extra load), normal force adjusts accordingly: \( F_N = mg – F_{\text{up}} \) or \( F_N = mg + F_{\text{extra}} \).
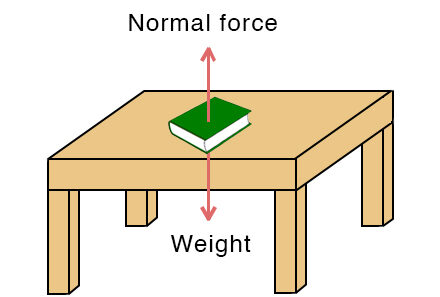
\( F_N = \text{component of contact force perpendicular to the surface} \)
2. Frictional Force \( F_f \)
- Friction acts parallel to the surface and opposes motion or attempted motion.
- Static friction: prevents motion, adjusts up to a limit: \( F_f \leq \mu_s F_N \)
- Kinetic (dynamic) friction: acts when body is sliding: \( F_f = \mu_d F_N \)
- \( \mu_s \) (static coefficient) is typically larger than \( \mu_d \).

\( \text{If body is stationary: } F_f \leq \mu_s F_N \)
\( \text{If body is sliding: } F_f = \mu_d F_N \)
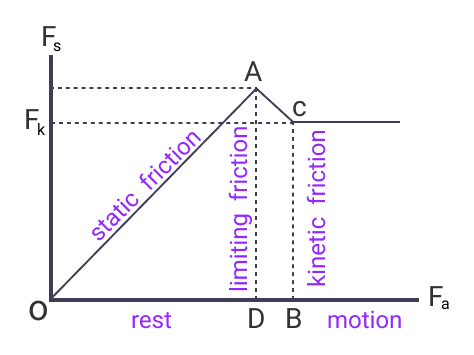
A graph between the applied force and types of friction is shown in the figure above.
Here,
- OD represents that the body is at rest.
- OA represents static friction.
- AD represents the maximum static friction called limiting friction.
- The region beyond D represents that the body is in motion.
- CB represents kinetic friction.
3. Tension Force \( T \)
- Tension occurs in strings, cables, or ropes pulling on an object.
- It is always directed along the string, away from the object.
- Assumed to be uniform in a massless, inextensible string.
- Tension balances forces in systems like elevators, pulleys, hanging masses.
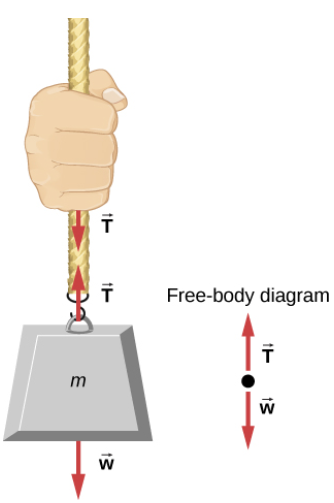
\( T = \text{Force transmitted through a taut string} \)
4. Elastic Restoring Force \( F_H \)
- Applies when an object like a spring is stretched or compressed from equilibrium.
- According to Hooke’s Law: \( F_H = -kx \), where:
- \( k \) = spring constant (stiffness)
- \( x \) = displacement from equilibrium
- Negative sign indicates force is always opposite to displacement.
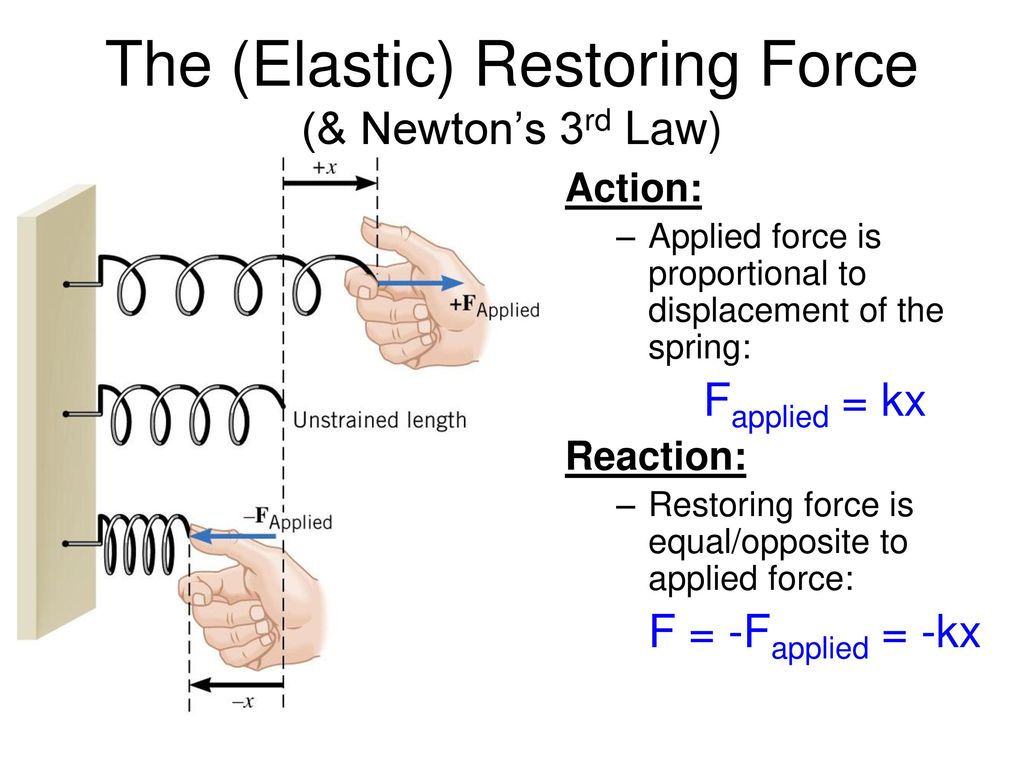
\( F_H = -kx \)
5. Viscous Drag Force \( F_d \)
- Applies when a small spherical object moves through a viscous fluid (slow speed regime).
- Given by Stokes’ Law: \( F_d = 6 \pi \eta r v \), where:
- \( \eta \) = viscosity of fluid
- \( r \) = radius of sphere
- \( v \) = velocity through the fluid
- Opposes motion and increases with speed.

\( F_d = 6 \pi \eta r v \)
6. Buoyant Force \( F_b \)
- Upward force experienced by an object submerged in fluid due to displaced fluid.
- Based on Archimedes’ principle: \( F_b = \rho V g \)
- Where:
- \( \rho \) = density of fluid
- \( V \) = volume of fluid displaced
- \( g \) = gravitational field strength

\( F_b = \rho V g \)
Example
A 5 kg block is placed on a frictionless incline that makes a 30° angle with the horizontal. Calculate the normal force acting on the block.
▶️ Answer/Explanation
∙ Weight of the block: \( F_g = mg = 5 \times 9.8 = 49 \, \text{N} \)
∙ On an incline, the normal force is the component of weight perpendicular to the surface: \( F_N = F_g \cos\theta \)
\( F_N = 49 \cos(30^\circ) = 49 \times 0.866 = \boxed{42.4 \, \text{N}} \)
Example
A 10 kg crate slides across a floor with coefficient of kinetic friction \( \mu_d = 0.3 \). Find the frictional force acting on it.
▶️ Answer/Explanation
∙ Normal force \( F_N = mg = 10 \times 9.8 = 98 \, \text{N} \)
∙ Kinetic friction formula: \( F_f = \mu_d F_N = 0.3 \times 98 = \boxed{29.4 \, \text{N}} \)
Example
A 3 kg object hangs at rest from a rope. Find the tension in the rope.
▶️ Answer/Explanation
∙ At rest, tension balances weight: \( T = F_g = mg = 3 \times 9.8 = \boxed{29.4 \, \text{N}} \)
Example
A spring with spring constant \( k = 150 \, \text{N/m} \) is stretched by 0.2 m. Calculate the restoring force.
▶️ Answer/Explanation
∙ Hooke’s Law: \( F_H = -kx = -150 \times 0.2 = \boxed{-30 \, \text{N}} \)
∙ Negative sign indicates force is directed opposite to the displacement.
Example
A cube of volume \( 0.01 \, \text{m}^3 \) is fully submerged in water (\( \rho = 1000 \, \text{kg/m}^3 \)). Find the buoyant force.
▶️ Answer/Explanation
∙ Archimedes’ principle: \( F_b = \rho V g = 1000 \times 0.01 \times 9.8 = \boxed{98 \, \text{N}} \)
Field Forces
1. Gravitational Force \( F_g \)
- Acts between any two masses. On Earth, it’s simply the weight of the object.
- Always directed toward the center of mass (e.g., Earth’s center).
- Given by \( F_g = mg \)
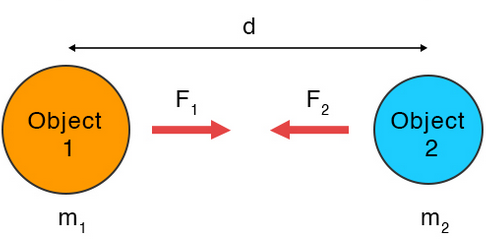
\( F_g = mg \)
\( g = \) The standard value for the acceleration due to gravity on Earth’s surface is approximately 9.8 m/s² (meters per second squared).
2. Electric Force \( F_e \)
- Acts between electric charges.
- Attractive for opposite charges, repulsive for like charges.
- Given by Coulomb’s Law: \( F_e = \frac{k q_1 q_2}{r^2} \) where \( k \) is Coulomb’s constant.
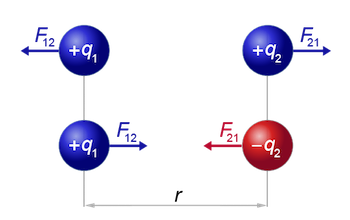
\( F_e = \frac{k q_1 q_2}{r^2} \)
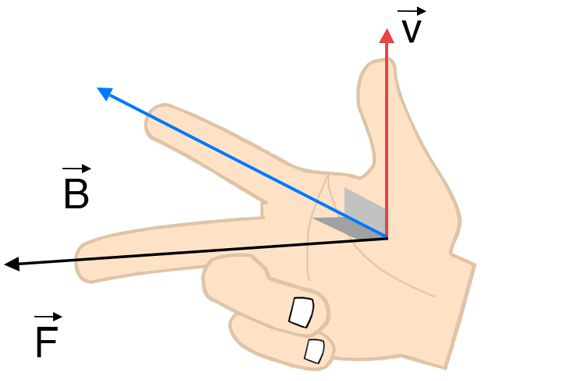
3. Magnetic Force \( F_m \)
- Acts on moving charges in a magnetic field.
- Direction given by right-hand rule.
- Magnitude: \( F_m = qvB \sin \theta \), where:
- \( q \) = charge
- \( v \) = velocity of charge
- \( B \) = magnetic field strength
- \( \theta \) = angle between velocity and magnetic field
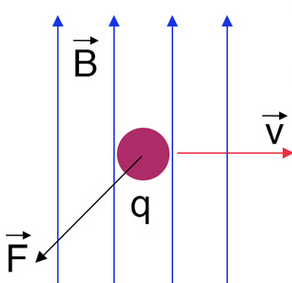
\( F_m = qvB \sin \theta \)
Example
What is the gravitational force acting on a 7 kg object on Earth?
▶️ Answer/Explanation
∙ Weight = \( F_g = mg = 7 \times 9.8 = \boxed{68.6 \, \text{N}} \)
Example
Two charges \( q_1 = 2 \times 10^{-6} \, \text{C} \) and \( q_2 = -3 \times 10^{-6} \, \text{C} \) are 0.1 m apart in air. Find the magnitude of the electric force between them. (Take \( k = 9 \times 10^9 \, \text{Nm}^2/\text{C}^2 \))
▶️ Answer/Explanation
\( F_e = \frac{k |q_1 q_2|}{r^2} = \frac{9 \times 10^9 \times (2 \times 10^{-6})(3 \times 10^{-6})}{(0.1)^2} \)
\( F_e = \frac{54 \times 10^{-3}}{0.01} = \boxed{5.4 \, \text{N}} \)
Example
A proton with charge \( q = 1.6 \times 10^{-19} \, \text{C} \) moves at \( 3 \times 10^6 \, \text{m/s} \) perpendicular to a magnetic field of \( 0.2 \, \text{T} \). Find the magnetic force.
▶️ Answer/Explanation
∙ Magnetic force: \( F_m = qvB = 1.6 \times 10^{-19} \times 3 \times 10^6 \times 0.2 \)
\( F_m = \boxed{9.6 \times 10^{-14} \, \text{N}} \)