Vector Notation
Column Vectors
- In 2 dimensions: \(\begin{pmatrix} x \\ y \end{pmatrix}\) represents the vector with components \(x\) and \(y\).
- In 3 dimensions: \(\begin{pmatrix} x \\ y \\ z \end{pmatrix}\) represents the vector with components \(x\), \(y\), and \(z\).
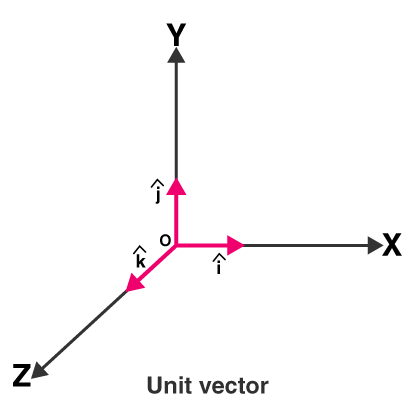
Unit Vector Notation
- In 2D: a vector can be expressed as \(x\mathbf{i} + y\mathbf{j}\), where \(\mathbf{i}\) and \(\mathbf{j}\) are unit vectors along the \(x\)- and \(y\)-axes respectively.
- In 3D: a vector can be expressed as \(x\mathbf{i} + y\mathbf{j} + z\mathbf{k}\), where \(\mathbf{k}\) is the unit vector along the \(z\)-axis.
Directed Line Segments
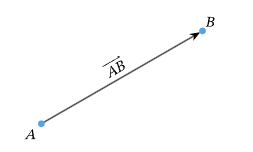
- \(\vec{AB}\) denotes the vector from point \(A\) to point \(B\).
- If \(A(x_1, y_1, z_1)\) and \(B(x_2, y_2, z_2)\), then \(\vec{AB} = \begin{pmatrix} x_2 – x_1 \\ y_2 – y_1 \\ z_2 – z_1 \end{pmatrix}\).
General Vector Notation
- A vector may be denoted by a bold letter, e.g. \(\mathbf{a}, \mathbf{b}, \mathbf{v}\).
- Alternatively, an arrow notation can be used, e.g. \(\vec{a}\).
Example:
Let \(A(1,2,-1)\) and \(B(4,-2,3)\). Express \(\vec{AB}\) in:
- Column vector form
- \(\mathbf{i}, \mathbf{j}, \mathbf{k}\) form
▶️ Answer/Explanation
Step 1: Compute \(\vec{AB}\).
\(\vec{AB} = \begin{pmatrix} 4-1 \\ -2-2 \\ 3-(-1) \end{pmatrix} = \begin{pmatrix} 3 \\ -4 \\ 4 \end{pmatrix}\).
Step 2: Write in unit vector form.
\(\vec{AB} = 3\mathbf{i} – 4\mathbf{j} + 4\mathbf{k}\).
Final Answer:
- Column vector form: \(\begin{pmatrix} 3 \\ -4 \\ 4 \end{pmatrix}\)
- Unit vector form: \(3\mathbf{i} – 4\mathbf{j} + 4\mathbf{k}\)
Example:
Let \(P(2,5)\) and \(Q(-1,1)\). Express \(\vec{PQ}\) in:
- Column vector form
- \(\mathbf{i}, \mathbf{j}\) form
▶️ Answer/Explanation
Step 1: Compute \(\vec{PQ}\).
\(\vec{PQ} = \begin{pmatrix} -1 – 2 \\ 1 – 5 \end{pmatrix} = \begin{pmatrix} -3 \\ -4 \end{pmatrix}\).
Step 2: Write in unit vector form.
\(\vec{PQ} = -3\mathbf{i} – 4\mathbf{j}\).
Final Answer:
- Column vector form: \(\begin{pmatrix} -3 \\ -4 \end{pmatrix}\)
- Unit vector form: \(-3\mathbf{i} – 4\mathbf{j}\)
Vector Addition, Subtraction, and Scalar Multiplication
Add/Subtract:
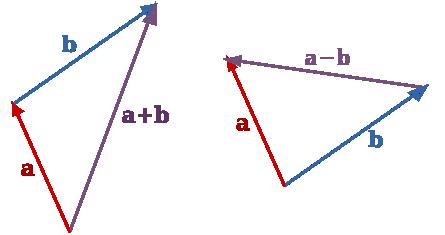
For vectors \(\mathbf{a} = \begin{pmatrix} x_1 \\ y_1 \end{pmatrix}\), \(\mathbf{b} = \begin{pmatrix} x_2 \\ y_2 \end{pmatrix}\),
\(\mathbf{a} + \mathbf{b} = \begin{pmatrix} x_1 + x_2 \\ y_1 + y_2 \end{pmatrix}\),
\(\mathbf{a} – \mathbf{b} = \begin{pmatrix} x_1 – x_2 \\ y_1 – y_2 \end{pmatrix}\).
Scalar Multiplication:
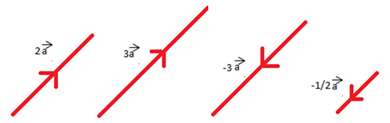
For scalar \(k\),
\(k\mathbf{a} = \begin{pmatrix} kx_1 \\ ky_1 \end{pmatrix}\).
Special Case: Midpoint
The midpoint \(M\) of \(AB\), with position vectors \(\vec{OA}, \vec{OB}\), has
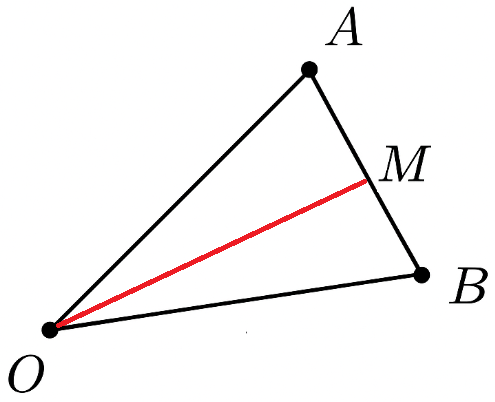
$\vec{OM} = \dfrac{1}{2}(\vec{OA} + \vec{OB}).$
Example:
Let \(A(2,1)\), \(B(6,5)\), and \(O\) be the origin. Show that \(OABC\) is a parallelogram, where \(C\) is the point with coordinates \((4,0)\).
▶️ Answer/Explanation
\(\vec{OA} = \begin{pmatrix} 2 \\ 1 \end{pmatrix}, \quad \vec{OB} = \begin{pmatrix} 6 \\ 5 \end{pmatrix}, \quad \vec{OC} = \begin{pmatrix} 4 \\ 0 \end{pmatrix}\).
\(\vec{OA} + \vec{OC} = \begin{pmatrix} 2 \\ 1 \end{pmatrix} + \begin{pmatrix} 4 \\ 0 \end{pmatrix} = \begin{pmatrix} 6 \\ 1 \end{pmatrix}\).
But \(\vec{OB} = \begin{pmatrix} 6 \\ 5 \end{pmatrix}\), not the same. Let’s check instead: \(\vec{OB} – \vec{OA} = \begin{pmatrix} 6-2 \\ 5-1 \end{pmatrix} = \begin{pmatrix} 4 \\ 4 \end{pmatrix}\). \(\vec{OC} – \vec{O} = \begin{pmatrix} 4 \\ 0 \end{pmatrix}\).
Hmm — doesn’t align yet. Let’s instead check \(\vec{OB} = \vec{OA} + \vec{AC}\).
Correction: Compute \(\vec{AC}\).
\(\vec{AC} = \vec{OC} – \vec{OA} = \begin{pmatrix} 4-2 \\ 0-1 \end{pmatrix} = \begin{pmatrix} 2 \\ -1 \end{pmatrix}\).
Then \(\vec{OA} + \vec{AC} = \begin{pmatrix} 2 \\ 1 \end{pmatrix} + \begin{pmatrix} 2 \\ -1 \end{pmatrix} = \begin{pmatrix} 4 \\ 0 \end{pmatrix} = \vec{OC}\).
Since opposite sides are equal in vector form, \(OABC\) is a parallelogram.
Final Answer: \(\boxed{OABC \text{ is a parallelogram}}\).
Example:
The position vectors of \(A\) and \(B\) are \(\vec{OA} = \begin{pmatrix} 2 \\ 3 \end{pmatrix}\) and \(\vec{OB} = \begin{pmatrix} 6 \\ 7 \end{pmatrix}\). Find the position vector of the midpoint \(M\) of \(AB\).
▶️ Answer/Explanation
\(\vec{OM} = \dfrac{1}{2}(\vec{OA} + \vec{OB})\).
\(\vec{OM} = \dfrac{1}{2}\left( \begin{pmatrix} 2 \\ 3 \end{pmatrix} + \begin{pmatrix} 6 \\ 7 \end{pmatrix} \right)\) \(= \dfrac{1}{2}\begin{pmatrix} 8 \\ 10 \end{pmatrix}\).
\(\vec{OM} = \begin{pmatrix} 4 \\ 5 \end{pmatrix}\).
Final Answer: The midpoint has position vector \(\boxed{\begin{pmatrix} 4 \\ 5 \end{pmatrix}}\).
Vectors: Magnitude, Unit Vectors, and Displacements
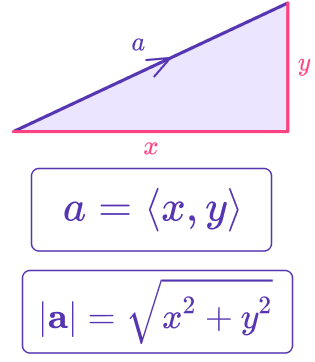
Magnitude of a Vector
- For a vector \(\vec{a} = \begin{pmatrix} x \\ y \end{pmatrix}\), the magnitude is \(|\vec{a}| = \sqrt{x^2 + y^2}\).
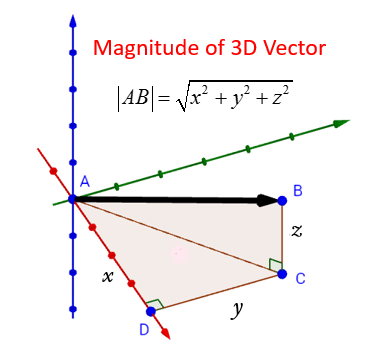
- For a 3D vector \(\vec{a} = \begin{pmatrix} x \\ y \\ z \end{pmatrix}\), the magnitude is \(|\vec{a}| = \sqrt{x^2 + y^2 + z^2}\).
Unit Vector
- A unit vector in the direction of \(\vec{a}\) is given by \(\dfrac{\vec{a}}{|\vec{a}|}\).
- It has magnitude 1 and points in the same direction as \(\vec{a}\).
Position Vector
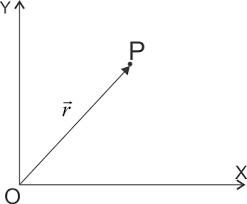
- If \(P(x,y)\) is a point in 2D, its position vector is \(\vec{OP} = \begin{pmatrix} x \\ y \end{pmatrix}\).
- If \(P(x,y,z)\) is a point in 3D, its position vector is \(\vec{OP} = \begin{pmatrix} x \\ y \\ z \end{pmatrix}\).
Displacement Vector
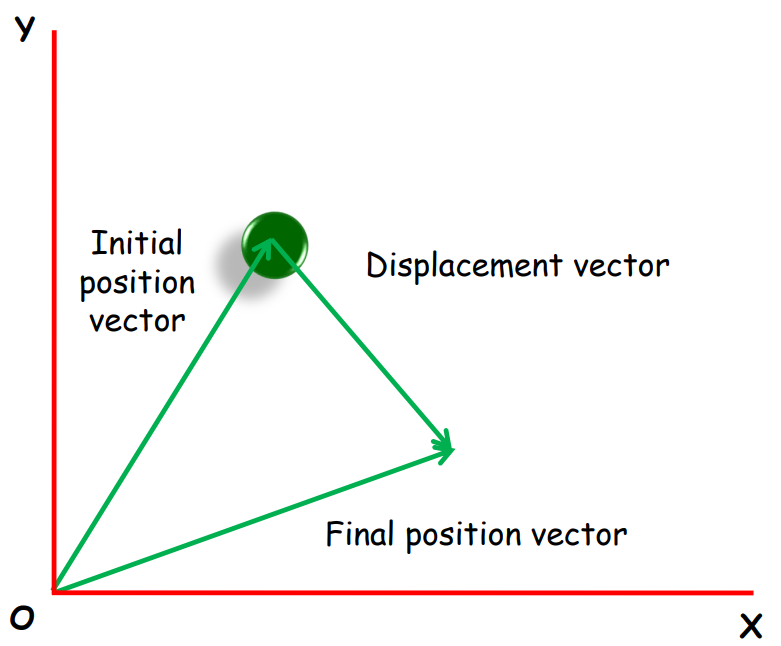
- If \(A(x_1, y_1)\) and \(B(x_2, y_2)\), then \(\vec{AB} = \begin{pmatrix} x_2 – x_1 \\ y_2 – y_1 \end{pmatrix}\).
- If \(A(x_1, y_1, z_1)\) and \(B(x_2, y_2, z_2)\), then \(\vec{AB} = \begin{pmatrix} x_2 – x_1 \\ y_2 – y_1 \\ z_2 – z_1 \end{pmatrix}\).
Example:
Let \(A(1,2)\) and \(B(5,6)\). Find:
- The displacement vector \(\vec{AB}\).
- The magnitude of \(\vec{AB}\).
- The unit vector in the direction of \(\vec{AB}\).
▶️ Answer/Explanation
\(\vec{AB} = \begin{pmatrix} 5-1 \\ 6-2 \end{pmatrix} = \begin{pmatrix} 4 \\ 4 \end{pmatrix}\).
\(|\vec{AB}| = \sqrt{4^2 + 4^2} = \sqrt{32} = 4\sqrt{2}\).
\(\hat{u} = \dfrac{\vec{AB}}{|\vec{AB}|} = \dfrac{1}{4\sqrt{2}}\begin{pmatrix} 4 \\ 4 \end{pmatrix} = \begin{pmatrix} \tfrac{1}{\sqrt{2}} \\ \tfrac{1}{\sqrt{2}} \end{pmatrix}\).
Example:
Let \(P(2, -1, 3)\) and \(Q(5, 3, 7)\). Find:
- The displacement vector \(\vec{PQ}\).
- The magnitude of \(\vec{PQ}\).
- The unit vector in the direction of \(\vec{PQ}\).
▶️ Answer/Explanation
\(\vec{PQ} = \begin{pmatrix} 5-2 \\ 3-(-1) \\ 7-3 \end{pmatrix} = \begin{pmatrix} 3 \\ 4 \\ 4 \end{pmatrix}\).
\(|\vec{PQ}| = \sqrt{3^2 + 4^2 + 4^2} = \sqrt{41}\).
\(\hat{u} = \dfrac{\vec{PQ}}{|\vec{PQ}|} = \dfrac{1}{\sqrt{41}}\begin{pmatrix} 3 \\ 4 \\ 4 \end{pmatrix}\).
Equation of a Line in Vector Form
The vector equation of a line is written as: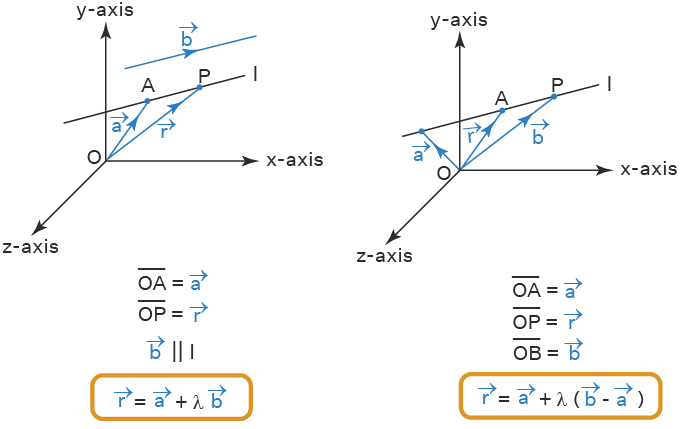
\(\mathbf{r} = \mathbf{a} + \lambda \mathbf{b}, \quad \lambda \in \mathbb{R}\)
Meaning of symbols:
- \(\mathbf{r}\): the position vector of a general point on the line.
- \(\mathbf{a}\): the position vector of a fixed point on the line.
- \(\mathbf{b}\): a direction vector that is parallel to the line.
- \(\lambda\): a real parameter that varies, producing all points on the line.
Geometric interpretation:
- The line passes through the point with position vector \(\mathbf{a}\).
- It extends infinitely in both directions parallel to \(\mathbf{b}\).
- Every point on the line can be reached by starting at \(\mathbf{a}\) and moving some multiple \(\lambda\) of the direction vector \(\mathbf{b}\).
Example:
Find the equation of the line passing through the point \(A(2, -1, 3)\) with direction vector \(\mathbf{b} = \begin{pmatrix} 1 \\ 4 \\ -2 \end{pmatrix}\).
▶️ Answer/Explanation
Step 1: Position vector of point \(A\)
\(\mathbf{a} = \begin{pmatrix} 2 \\ -1 \\ 3 \end{pmatrix}\).
Step 2: Write equation of line
\(\mathbf{r} = \mathbf{a} + \lambda \mathbf{b} = \begin{pmatrix} 2 \\ -1 \\ 3 \end{pmatrix} + \lambda \begin{pmatrix} 1 \\ 4 \\ -2 \end{pmatrix}\).
Final Answer:
\(\mathbf{r} = \begin{pmatrix} 2 + \lambda \\ -1 + 4\lambda \\ 3 – 2\lambda \end{pmatrix}\).
Example:
Find the equation of the line passing through \(P(1, 2, -1)\) and \(Q(4, -1, 2)\).
▶️ Answer/Explanation
Step 1: Position vector of point \(P\)
\(\mathbf{a} = \begin{pmatrix} 1 \\ 2 \\ -1 \end{pmatrix}\).
Step 2: Direction vector
\(\mathbf{b} = \vec{PQ} = \begin{pmatrix} 4-1 \\ -1-2 \\ 2-(-1) \end{pmatrix} = \begin{pmatrix} 3 \\ -3 \\ 3 \end{pmatrix}\).
Step 3: Write equation of line
\(\mathbf{r} = \mathbf{a} + \lambda \mathbf{b} = \begin{pmatrix} 1 \\ 2 \\ -1 \end{pmatrix} + \lambda \begin{pmatrix} 3 \\ -3 \\ 3 \end{pmatrix}\).
Final Answer:
\(\mathbf{r} = \begin{pmatrix} 1 + 3\lambda \\ 2 – 3\lambda \\ -1 + 3\lambda \end{pmatrix}\).
Relative Position of Two Lines in 3D
Suppose the equations of two lines are:
\(\mathbf{r} = \mathbf{a} + \lambda \mathbf{b}, \quad \mathbf{r} = \mathbf{c} + \mu \mathbf{d}\)
Step 1: Check for parallelism
- The lines are parallel if the direction vectors are proportional: \(\mathbf{b} = k\mathbf{d}\) for some scalar \(k\).
Step 2: Check for intersection
Equating the vector equations gives:
\(\mathbf{a} + \lambda \mathbf{b} = \mathbf{c} + \mu \mathbf{d}\).
- This produces simultaneous equations in \(\lambda\) and \(\mu\).
- If there is a consistent solution, the lines intersect at that point.
Step 3: Skew lines
- If the lines are not parallel and do not intersect, then they are skew (non-coplanar).
Example :
Determine whether the lines \(L_1: \mathbf{r} = \begin{pmatrix} 1 \\ 2 \\ 3 \end{pmatrix} + \lambda \begin{pmatrix} 2 \\ -1 \\ 1 \end{pmatrix}\) and \(L_2: \mathbf{r} = \begin{pmatrix} 3 \\ 1 \\ 0 \end{pmatrix} + \mu \begin{pmatrix} 1 \\ 1 \\ 2 \end{pmatrix}\) intersect. If so, find the point of intersection.
▶️ Answer/Explanation
\(L_1: (x,y,z) = (1+2\lambda,\, 2-\lambda,\, 3+\lambda)\) \(L_2: (x,y,z) = (3+\mu,\, 1+\mu,\, 0+2\mu)\)
SEquating coordinates
\(1+2\lambda = 3+\mu\) … (1)
\(2-\lambda = 1+\mu\) … (2)
\(3+\lambda = 2\mu\) … (3)
From (2): \(-\lambda = \mu -1 \implies \mu = 1-\lambda\).
Substitute into (1): \(1+2\lambda = 3+(1-\lambda) \implies 3\lambda = 3 \implies \lambda = 1\).
Then \(\mu = 0\).
Check in (3): \(3+1 = 2(0)\) → \(4 \neq 0\).
Conclusion: No solution → lines are skew.
Example :
Check if the lines \(L_1: \mathbf{r} = \begin{pmatrix} 1 \\ 0 \\ -1 \end{pmatrix} + \lambda \begin{pmatrix} 2 \\ 1 \\ 3 \end{pmatrix}\) and \(L_2: \mathbf{r} = \begin{pmatrix} 3 \\ 1 \\ 2 \end{pmatrix} + \mu \begin{pmatrix} -1 \\ 1 \\ 0 \end{pmatrix}\) intersect. If so, find the point of intersection.
▶️ Answer/Explanation
\(L_1: (x,y,z) = (1+2\lambda,\, 0+\lambda,\, -1+3\lambda)\) \(L_2: (x,y,z) = (3-\mu,\, 1+\mu,\, 2)\)
Equating coordinates
\(1+2\lambda = 3-\mu\) … (1)
\(\lambda = 1+\mu\) … (2)
\(-1+3\lambda = 2\) … (3)
From (3): \(3\lambda = 3 \implies \lambda = 1\).
Substitute into (2): \(1 = 1+\mu \implies \mu = 0\).
Check in (1): \(1+2(1) = 3-0 \implies 3 = 3\)
Find intersection point
Substitute \(\lambda=1\) into \(L_1\): \((1+2,\,1,\, -1+3) = (3,1,2)\).
Final Answer: The lines intersect at \(\boxed{(3,1,2)}\).
Example:
Decide whether the lines
\(L_1: \mathbf{r} = \begin{pmatrix} 1 \\ 2 \\ 3 \end{pmatrix} + \lambda \begin{pmatrix} 2 \\ -1 \\ 4 \end{pmatrix}\) and \(L_2: \mathbf{r} = \begin{pmatrix} 3 \\ 0 \\ 11 \end{pmatrix} + \mu \begin{pmatrix} 4 \\ -2 \\ 8 \end{pmatrix}\)
are parallel, intersecting, or skew. If they intersect, find the point of intersection.
▶️ Answer/Explanation
Direction of \(L_1\) is \(\mathbf{b} = \begin{pmatrix} 2 \\ -1 \\ 4 \end{pmatrix}\).
Direction of \(L_2\) is \(\mathbf{d} = \begin{pmatrix} 4 \\ -2 \\ 8 \end{pmatrix} = 2\begin{pmatrix} 2 \\ -1 \\ 4 \end{pmatrix} = 2\mathbf{b}\).
Since \(\mathbf{d}\) is a scalar multiple of \(\mathbf{b}\), the lines are either parallel or coincident.
Take the position vectors of points on each line:
\(\mathbf{a} = \begin{pmatrix} 1 \\ 2 \\ 3 \end{pmatrix}\) (on \(L_1\)) and \(\mathbf{c} = \begin{pmatrix} 3 \\ 0 \\ 11 \end{pmatrix}\) (on \(L_2\)).
Form \(\mathbf{c} – \mathbf{a} = \begin{pmatrix} 3-1 \\ 0-2 \\ 11-3 \end{pmatrix} = \begin{pmatrix} 2 \\ -2 \\ 8 \end{pmatrix}\).
If the lines were coincident, \(\mathbf{c}-\mathbf{a}\) would be parallel to \(\mathbf{b}\).
Check ratios: \(\dfrac{2}{2} = 1,\; \dfrac{-2}{-1} = 2,\; \dfrac{8}{4} = 2\).
Ratios are not all equal, so \(\mathbf{c}-\mathbf{a}\) is not a scalar multiple of \(\mathbf{b}\). Therefore the lines are not the same line.
Since direction vectors are proportional but the lines are not coincident, the lines are parallel and distinct, hence they do not intersect.
Optional verification by attempting to solve for intersection
Equate coordinates: \(1+2\lambda = 3+4\mu\) … (1), \(2-\lambda = 0-2\mu\) … (2), \(3+4\lambda = 11+8\mu\) … (3).
From (2): \(\lambda = 2 + 2\mu\). Substitute into (1): \(1 + 2(2+2\mu) = 3 + 4\mu \Rightarrow 1 + 4 + 4\mu = 3 + 4\mu \Rightarrow 5 = 3\), contradiction. So no solution exists, confirming no intersection.
The lines are parallel and distinct (no intersection).
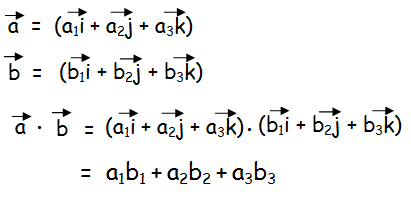
Scalar (Dot) Product of Vectors
For two vectors \(\mathbf{a} = \begin{pmatrix} a_1 \\ a_2 \\ a_3 \end{pmatrix}\) and \(\mathbf{b} = \begin{pmatrix} b_1 \\ b_2 \\ b_3 \end{pmatrix}\), the scalar (dot) product is:
\(\mathbf{a}\cdot\mathbf{b} = a_1 b_1 + a_2 b_2 + a_3 b_3\).
It can also be expressed in terms of the magnitudes and the angle \(\theta\) between them:
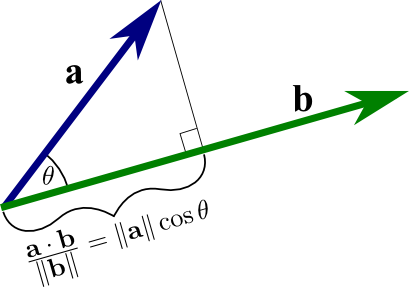
\(\mathbf{a}\cdot\mathbf{b} = |\mathbf{a}|\,|\mathbf{b}|\cos\theta\).
Key facts:
- If \(\mathbf{a}\cdot\mathbf{b} = 0\), the vectors are perpendicular.
- To find the angle between two lines with direction vectors \(\mathbf{b}_1, \mathbf{b}_2\), use \(\cos\theta = \dfrac{\mathbf{b}_1 \cdot \mathbf{b}_2}{|\mathbf{b}_1||\mathbf{b}_2|}\).
- To find the foot of the perpendicular from a point \(P\) to a line, use the condition that the vector from the foot to \(P\) is perpendicular to the line’s direction vector.
Example:
Find the angle between the lines
\(L_1: \mathbf{r} = \begin{pmatrix} 1 \\ 0 \\ 2 \end{pmatrix} + \lambda \begin{pmatrix} 1 \\ 2 \\ -1 \end{pmatrix},\quad L_2: \mathbf{r} = \begin{pmatrix} 3 \\ 1 \\ 4 \end{pmatrix} + \mu \begin{pmatrix} 2 \\ -1 \\ 1 \end{pmatrix}.\)
▶️ Answer/Explanation
For \(L_1\): \(\mathbf{b}_1 = \begin{pmatrix} 1 \\ 2 \\ -1 \end{pmatrix}\).
For \(L_2\): \(\mathbf{b}_2 = \begin{pmatrix} 2 \\ -1 \\ 1 \end{pmatrix}\).
scalar product.
\(\mathbf{b}_1 \cdot \mathbf{b}_2 = (1)(2) + (2)(-1) + (-1)(1) = 2 – 2 – 1 = -1\).
Magnitudes.
\(|\mathbf{b}_1| = \sqrt{1^2 + 2^2 + (-1)^2} = \sqrt{1+4+1} = \sqrt{6}\). \(|\mathbf{b}_2| = \sqrt{2^2 + (-1)^2 + 1^2} = \sqrt{4+1+1} = \sqrt{6}\).
\(\cos\theta = \dfrac{\mathbf{b}_1 \cdot \mathbf{b}_2}{|\mathbf{b}_1||\mathbf{b}_2|} = \dfrac{-1}{\sqrt{6}\sqrt{6}} = \dfrac{-1}{6}\).
\(\theta = \cos^{-1}\left(-\dfrac{1}{6}\right)\).
Final Answer: The angle between the lines is \(\boxed{\cos^{-1}(-1/6)}\).
Example:
Find the foot of the perpendicular from point \(P(3,2,1)\) to the line \(\mathbf{r} = \begin{pmatrix} 1 \\ 0 \\ 1 \end{pmatrix} + \lambda \begin{pmatrix} 2 \\ -1 \\ 2 \end{pmatrix}\).
▶️ Answer/Explanation
A general point on the line is \(\mathbf{R} = \begin{pmatrix} 1+2\lambda \\ -\lambda \\ 1+2\lambda \end{pmatrix}\).
Vector from point on line to \(P\).
\(\overrightarrow{RP} = \begin{pmatrix} 3-(1+2\lambda) \\ 2-(-\lambda) \\ 1-(1+2\lambda) \end{pmatrix} = \begin{pmatrix} 2-2\lambda \\ 2+\lambda \\ -2\lambda \end{pmatrix}\).
Condition for perpendicularity.
\(\overrightarrow{RP} \cdot \mathbf{b} = 0,\) where \(\mathbf{b} = \begin{pmatrix} 2 \\ -1 \\ 2 \end{pmatrix}\).
\(\begin{pmatrix} 2-2\lambda \\ 2+\lambda \\ -2\lambda \end{pmatrix} \cdot \begin{pmatrix} 2 \\ -1 \\ 2 \end{pmatrix} = 0\).
\((2-2\lambda)(2) + (2+\lambda)(-1) + (-2\lambda)(2) = 0\). \(4 – 4\lambda – 2 – \lambda – 4\lambda = 0\). \(2 – 9\lambda = 0 \implies \lambda = \tfrac{2}{9}\).
Find foot of perpendicular.
Substitute \(\lambda = \tfrac{2}{9}\): \(\mathbf{R} = \begin{pmatrix} 1+2(\tfrac{2}{9}) \\ -\tfrac{2}{9} \\ 1+2(\tfrac{2}{9}) \end{pmatrix} = \begin{pmatrix} \tfrac{13}{9} \\ -\tfrac{2}{9} \\ \tfrac{13}{9} \end{pmatrix}\).
Final Answer: The foot of the perpendicular is \(\boxed{\left(\tfrac{13}{9}, -\tfrac{2}{9}, \tfrac{13}{9}\right)}\).
Example:
In a cuboid with edges of lengths \(a = 2\), \(b = 3\) and \(c = 6\) along the \(x\), \(y\) and \(z\) axes respectively,
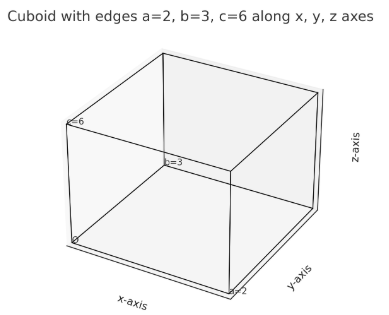
find the angle between the body diagonal \( \overrightarrow{OP} \) (from the origin \(O\) to the opposite vertex \(P\)) and the face diagonal \( \overrightarrow{OQ} \) on the base (from \(O\) to the opposite corner of the base rectangle).
▶️ Answer/Explanation
Place the cuboid with one corner at the origin \(O(0,0,0)\).
Then the opposite vertex is \(P(a,b,c) = (2,3,6)\).
The opposite corner of the base rectangle (on the \(xy\)-plane) is \(Q(a,b,0) = (2,3,0)\).
Thus
$ \overrightarrow{OP} = \begin{pmatrix} 2 \\ 3 \\ 6 \end{pmatrix}, \qquad \overrightarrow{OQ} = \begin{pmatrix} 2 \\ 3 \\ 0 \end{pmatrix}. $
$ \overrightarrow{OP}\cdot\overrightarrow{OQ} = 2\cdot 2 + 3\cdot 3 + 6\cdot 0 = 4 + 9 + 0 = 13. $
$ |\overrightarrow{OP}| = \sqrt{2^2 + 3^2 + 6^2} = \sqrt{4 + 9 + 36} = \sqrt{49} = 7, $
$ |\overrightarrow{OQ}| = \sqrt{2^2 + 3^2 + 0^2} = \sqrt{4 + 9} = \sqrt{13}. $
$ \cos\theta = \dfrac{\overrightarrow{OP}\cdot\overrightarrow{OQ}}{|\overrightarrow{OP}||\overrightarrow{OQ}|} = \dfrac{13}{7\sqrt{13}} = \dfrac{\sqrt{13}}{7}. $
Hence $ \theta = \cos^{-1}\!\left(\dfrac{\sqrt{13}}{7}\right). $