Scalar Quantities
A scalar quantity is fully described by its magnitude (size or numerical value) only.
- It does not require a direction for its definition.
- Notation: Scalars are usually written in italic lowercase letters, e.g. \( m \) for mass, \( t \) for time.
- Scalars can be positive, negative, or zero (e.g., temperature can be \(-5^\circ \text{C}\)).
Examples of scalar quantities:
- Mass (\( m \))
- Time (\( t \))
- Temperature (\( T \))
- Distance (\( d \))
- Speed (\( v \))
- Energy (\( E \))
- Power (\( P \))
Example :
A car moves 100 km in 2 hours. Calculate its speed and explain why it is a scalar quantity.
▶️Answer/Explanation
Step (1): Formula → \( v = \dfrac{\text{distance}}{\text{time}} \).
Step (2): Substitute values → \( v = \dfrac{100}{2} \, \text{km/h} \).
Step (3): \( v = 50 \, \text{km/h} \).
Reason: The result has only magnitude (50 km/h) but no direction, so speed is a scalar.
Example :
A runner goes 300 m east and then 200 m west. Find the total distance traveled and state why distance is a scalar.
▶️Answer/Explanation
Step (1): Total distance = sum of all path lengths.
Step (2): \( 300 + 200 = 500 \, \text{m} \).
Step (3): The result is independent of direction, it only adds lengths.
Final Answer: Distance traveled = 500 m → purely a scalar.
Vector Quantities
A vector quantity is described by both: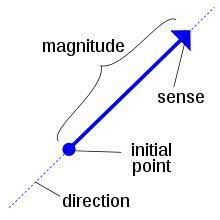
- Magnitude (size or numerical value)
- Direction in space
Notation:
- Vectors are notated with an arrow above the symbol, e.g. \( \vec{v} \) (velocity), \( \vec{F} \) (force).
- Alternatively, textbooks may use bold letters, e.g. F.
- The magnitude of a vector is written as \( |\vec{A}| \) or simply \( A \).
- Vector notation is not required for vector components along an axis. In one dimension, the sign (+ or –) is enough to specify direction.
Relevant Equations:
- General vector form: \( \vec{v} = \vec{v}_0 + \vec{a}t \)
- In one dimension (x-axis): \( v_x = v_{0x} + a_x t \)
Examples of vector quantities:
- Displacement (\( \vec{d} \))
- Velocity (\( \vec{v} \))
- Acceleration (\( \vec{a} \))
- Force (\( \vec{F} \))
- Momentum (\( \vec{p} \))
- Electric Field (\( \vec{E} \))
Example :
A car travels 100 km east in 2 hours. Find its velocity and explain why it is a vector quantity.
▶️Answer/Explanation
Step (1): Formula → \( \vec{v} = \dfrac{\text{displacement}}{\text{time}} \).
Step (2): Displacement = 100 km east, Time = 2 h.
Step (3): \( \vec{v} = \dfrac{100}{2} = 50 \, \text{km/h east} \).
Reason: Velocity includes both magnitude (50 km/h) and direction (east), so it is a vector.
Example :
A runner goes 300 m east and then 200 m west. Compare displacement (vector) with distance (scalar).
▶️Answer/Explanation
Step (1): Total distance = \( 300 + 200 = 500 \, \text{m} \) (scalar).
Step (2): Net displacement = \( 300 – 200 = 100 \, \text{m east} \) (vector).
Step (3): Distance only adds magnitudes, but displacement requires magnitude + direction.
Final Answer: Distance = 500 m (scalar), Displacement = 100 m east (vector).
Vector Sum and Difference in One Dimension
- In one dimension, vectors lie along a straight line (e.g., x-axis).
Sign convention: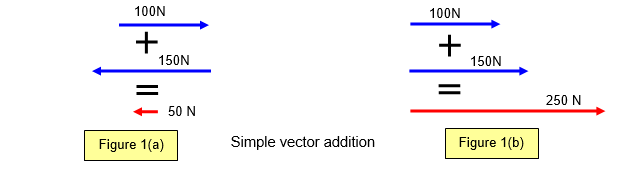
- Choose one direction as positive (e.g., right/east).
- The opposite direction is negative (e.g., left/west).
Vector Sum: Add the magnitudes algebraically with their signs.
\( R = A + B \) (where signs show direction).
Vector Difference: Subtract algebraically.
\( R = A – B \) (which is equivalent to \( A + (-B) \)).
The result may be positive (to the right) or negative (to the left), depending on sign convention.
Example:
Two displacements: \( +12 \, \text{m} \) east and \( -7 \, \text{m} \) west. Find the resultant displacement.
▶️Answer/Explanation
Step (1): Write algebraic form → \( R = 12 + (-7) \).
Step (2): \( R = 5 \, \text{m} \).
Step (3): Sign is positive → Resultant is to the east.
Final Answer: \( 5 \, \text{m east} \).
Example :
A car moves with velocity \( +20 \, \text{m/s} \) (east). Another car moves with velocity \( +12 \, \text{m/s} \) (east). Find the relative velocity of the first car with respect to the second.
▶️Answer/Explanation
Step (1): Formula for relative velocity → \( v_{AB} = v_A – v_B \).
Step (2): Substitute values → \( v_{AB} = 20 – 12 \).
Step (3): \( v_{AB} = +8 \, \text{m/s} \).
Final Answer: The first car moves at 8 m/s east relative to the second car.
Zero Vector
A zero vector has zero magnitude and no specific direction.
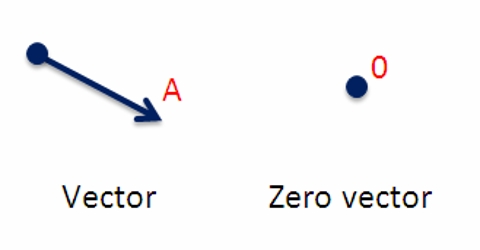
- Notation: \( \vec{0} \).
- Occurs when two equal and opposite vectors cancel each other.
- Example: If \( \vec{F}_1 = +10 \, \text{N} \) and \( \vec{F}_2 = -10 \, \text{N} \), then net force = \( \vec{F}_{net} = \vec{0} \).
Example:
A person walks 5 m east, then 5 m west. Find the net displacement.
▶️Answer/Explanation
Displacement = \( +5 + (-5) = 0 \, \text{m} \).
Resultant displacement is zero vector.
Unit Vector
A unit vector has a magnitude of 1 and is used to indicate direction only.
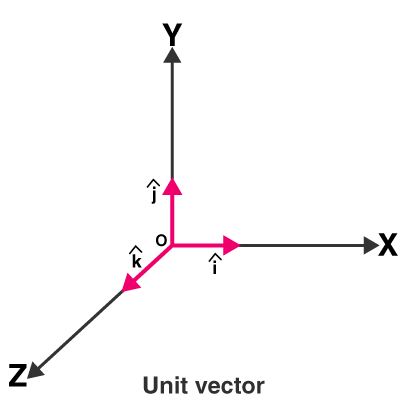
- Notation: \( \hat{i}, \hat{j}, \hat{k} \) represent the unit vectors along the x, y, and z axes.
- General formula: \( \hat{A} = \dfrac{\vec{A}}{|\vec{A}|} \).
- This expresses a vector’s direction independent of its magnitude.
Example:
If \( \vec{r} = 3\hat{i} + 4\hat{j} \), find the unit vector along \( \vec{r} \).
▶️Answer/Explanation
Step (1): Magnitude → \( |\vec{r}| = \sqrt{3^2 + 4^2} = 5 \).
Step (2): Unit vector → \( \hat{r} = \dfrac{3}{5}\hat{i} + \dfrac{4}{5}\hat{j} \).
Final Answer: \( \hat{r} = 0.6\hat{i} + 0.8\hat{j} \).
Resolution of a Vector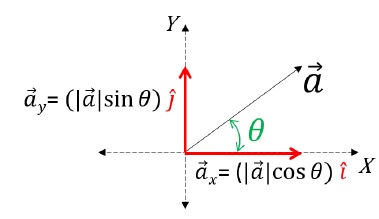
Resolution means splitting a vector into two perpendicular components, usually along the x- and y-axes.
- If a vector \( \vec{A} \) makes an angle \( \theta \) with the x-axis:
- Horizontal component: \( A_x = A \cos\theta \)
- Vertical component: \( A_y = A \sin\theta \)
- Thus, \( \vec{A} = A_x \hat{i} + A_y \hat{j} \).
- The original vector can be reconstructed: \( A = \sqrt{A_x^2 + A_y^2}, \quad \tan\theta = \dfrac{A_y}{A_x} \).
Example:
A force of 50 N acts at an angle of \( 30^\circ \) above the horizontal. Find its horizontal and vertical components.
▶️Answer/Explanation
Step (1): Horizontal component → \( F_x = F \cos\theta = 50 \cos 30^\circ \).
Step (2): Vertical component → \( F_y = F \sin\theta = 50 \sin 30^\circ \).
Step (3): \( F_x \approx 43.3 \, \text{N}, \, F_y = 25 \, \text{N} \).
Final Answer: \( \vec{F} = 43.3\hat{i} + 25\hat{j} \, \text{N} \).
Scalar (Dot) Product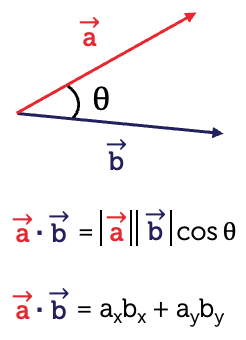
The scalar product (or dot product) of two vectors gives a scalar result.
- \( \vec{A} \cdot \vec{B} = |\vec{A}| |\vec{B}| \cos \theta \)
- Here, \( \theta \) = angle between the two vectors.
- If \( \theta = 90^\circ \), then \( \vec{A} \cdot \vec{B} = 0 \) (perpendicular vectors).
- Physical meaning: Measures the component of one vector along the direction of another.
Applications: Work done (\( W = \vec{F} \cdot \vec{d} \)), Power, projections.
Example:
A constant force of 20 N acts at \( 60^\circ \) to the direction of motion. The displacement is 10 m. Find the work done.
▶️Answer/Explanation
Step (1): Formula → \( W = \vec{F} \cdot \vec{d} = F d \cos \theta \).
Step (2): Substitute values → \( W = 20 \times 10 \times \cos 60^\circ \).
Step (3): \( W = 200 \times 0.5 = 100 \, \text{J} \).
Final Answer: Work done = 100 J.
Angle Between Two Vectors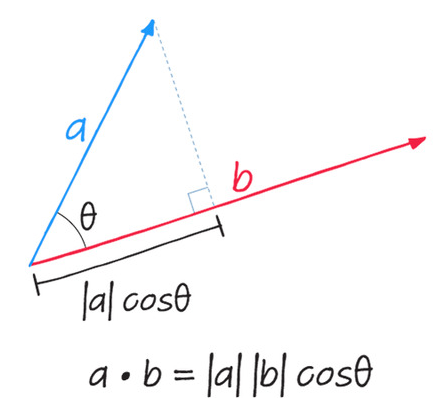
The angle \( \theta \) between two vectors can be found using the dot product formula:
- \( \vec{A} \cdot \vec{B} = |\vec{A}| |\vec{B}| \cos \theta \)
Rearranging for \( \theta \):
\( \theta = \cos^{-1}\!\left( \dfrac{\vec{A} \cdot \vec{B}}{|\vec{A}| |\vec{B}|} \right) \)
The dot product captures how much one vector extends in the direction of the other.
- If \( \theta = 0^\circ \) → vectors are parallel and point in the same direction.
- If \( \theta = 90^\circ \) → vectors are perpendicular (dot product = 0).
- If \( \theta = 180^\circ \) → vectors are parallel but in opposite directions.
Example:
Let \( \vec{A} = 3\hat{i} + 4\hat{j} \) and \( \vec{B} = 4\hat{i} + 3\hat{j} \). Find the angle between them.
▶️Answer/Explanation
Step (1): Formula → \( \cos \theta = \dfrac{\vec{A} \cdot \vec{B}}{|\vec{A}| |\vec{B}|} \).
Step (2): Dot product → \( \vec{A} \cdot \vec{B} = (3)(4) + (4)(3) = 12 + 12 = 24 \).
Step (3): Magnitudes → \( |\vec{A}| = \sqrt{3^2 + 4^2} = 5 \), \( |\vec{B}| = \sqrt{4^2 + 3^2} = 5 \).
Step (4): \( \cos \theta = \dfrac{24}{5 \times 5} = \dfrac{24}{25} \).
Step (5): \( \theta = \cos^{-1}\!\left(\dfrac{24}{25}\right) \approx 16.3^\circ \).
Final Answer: The angle between \( \vec{A} \) and \( \vec{B} \) is 16.3°.
Vector (Cross) Product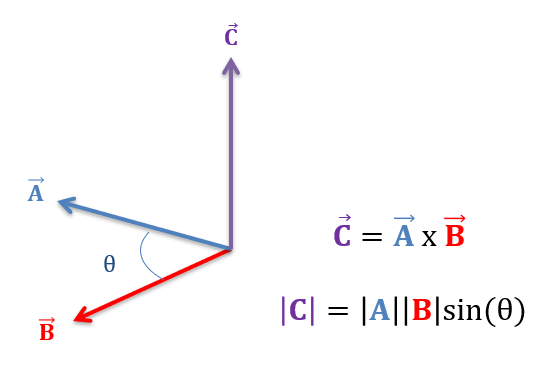
The vector product (or cross product) of two vectors gives a vector result.
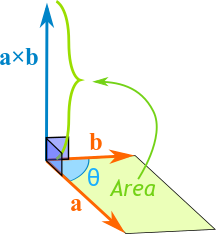
- \( \vec{A} \times \vec{B} = |\vec{A}| |\vec{B}| \sin \theta \, \hat{n} \)
- \( \hat{n} \) is a unit vector perpendicular to the plane containing \( \vec{A} \) and \( \vec{B} \) (direction given by the right-hand rule).
- If \( \theta = 0^\circ \) or \( 180^\circ \), then \( \vec{A} \times \vec{B} = \vec{0} \) (parallel vectors).
- Physical meaning: Measures the area of the parallelogram formed by the two vectors.
Applications: Torque (\( \vec{\tau} = \vec{r} \times \vec{F} \)), Angular momentum, Magnetic force.
Example:
A force of 15 N is applied at the end of a 0.4 m lever arm at \( 90^\circ \). Find the torque.
▶️Answer/Explanation
Step (1): Formula → \( \tau = rF \sin \theta \).
Step (2): Substitute values → \( \tau = 0.4 \times 15 \times \sin 90^\circ \).
Step (3): \( \tau = 6 \, \text{N·m} \).
Final Answer: Torque = 6 N·m, direction given by the right-hand rule (out of the plane).