Reference Frame of an Observer
To describe the motion of an object, we must specify a reference frame the coordinate system relative to which positions, velocities, and accelerations are measured. The description of motion always depends on the observer’s chosen frame of reference.
Definition:
A reference frame (or frame of reference) is a coordinate system attached to an observer, from which measurements of an object’s position, velocity, and acceleration are made.
It typically consists of: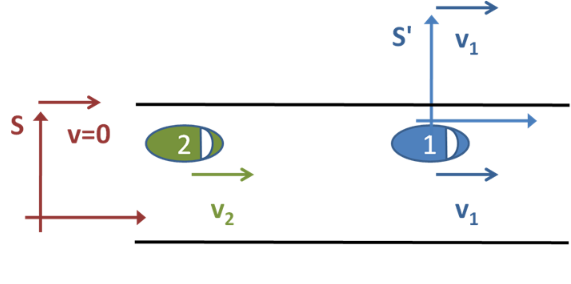
- A coordinate system (x-, y-, z-axes).
- A clock to measure time.
- An observer to record measurements.
Conceptual Understanding:
- The position of an object \( \mathrm{\vec{r}} \) is always described relative to a chosen origin in the reference frame.
- The same object may appear to have different velocities or accelerations to observers in different reference frames.
- Thus, motion is relative — it depends on the observer’s state of motion.
Mathematical Representation:
Consider two reference frames:
- \( \mathrm{S} \): stationary (ground) frame
- \( \mathrm{S’} \): moving frame with velocity \( \mathrm{\vec{v}_{S’S}} \) relative to \( \mathrm{S} \)
If an object has velocity \( \mathrm{\vec{v}_{PS’}} \) in \( \mathrm{S’} \), then its velocity in the stationary frame \( \mathrm{S} \) is:
\( \mathrm{\vec{v}_{PS} = \vec{v}_{PS’} + \vec{v}_{S’S}} \)
Key Idea: The direction and magnitude of measured quantities such as displacement, velocity, and acceleration depend on the observer’s reference frame.
Types of Reference Frames:
| Type | Description | Examples |
|---|---|---|
| Inertial Frame | A frame either at rest or moving at constant velocity; Newton’s laws are valid. | Ground, car moving steadily on a straight road. |
| Non-Inertial Frame | A frame that is accelerating; requires inclusion of fictitious (pseudo) forces. | Accelerating train, rotating carousel. |
Example:
A passenger walks toward the front of a train at \( \mathrm{2 \, m/s} \) relative to the train. The train moves at \( \mathrm{20 \, m/s} \) relative to the ground. Find the passenger’s velocity relative to the ground.
▶️ Answer / Explanation
Given:
- \( \mathrm{\vec{v}_{PS’} = 2 \, m/s} \) (passenger w.r.t. train)
- \( \mathrm{\vec{v}_{S’S} = 20 \, m/s} \) (train w.r.t. ground)
Step 1: Use the relative velocity relation:
\( \mathrm{\vec{v}_{PS} = \vec{v}_{PS’} + \vec{v}_{S’S}} \)
Step 2: Substitute:
\( \mathrm{\vec{v}_{PS} = 2 + 20 = 22 \, m/s} \)
Final Answer: The passenger’s velocity relative to the ground is \( \mathrm{22 \, m/s} \) in the direction of the train’s motion.
Motion of Objects as Measured by Observers in Different Inertial Reference Frames
The description of an object’s motion depends on the observer’s inertial reference frame. Observers in different frames may measure different values for an object’s position, displacement, and velocity, but they will always agree on the object’s acceleration if both frames are inertial.
1. Concept of Measurement in Different Inertial Frames:
- Each observer defines motion relative to their own coordinate system (reference frame).
- When the reference frames move at constant velocity relative to one another, both are considered inertial frames.
- Measured quantities such as position and velocity depend on the chosen frame, but acceleration does not.
2. Relation Between Observers in Two Inertial Frames:
Let:
- \( \mathrm{S} \): an inertial frame (e.g., the ground)
- \( \mathrm{S’} \): another inertial frame moving with velocity \( \mathrm{\vec{v}_{S’S}} \) relative to \( \mathrm{S} \)
- \( \mathrm{\vec{v}_{PS’}} \): velocity of object \( \mathrm{P} \) as seen by observer in \( \mathrm{S’} \)
- \( \mathrm{\vec{v}_{PS}} \): velocity of the same object as seen by observer in \( \mathrm{S} \)
The relationship between the two observers’ measurements is given by the Galilean velocity transformation:
\( \mathrm{\vec{v}_{PS} = \vec{v}_{PS’} + \vec{v}_{S’S}} \)
- If the two frames move in the same direction, their velocities are added.
- If they move in opposite directions, their velocities are subtracted.
3. Conversion of Measurements Between Frames:
- Position: \( \mathrm{\vec{r}_{PS} = \vec{r}_{PS’} + \vec{r}_{S’S}} \)
- Velocity: \( \mathrm{\vec{v}_{PS} = \vec{v}_{PS’} + \vec{v}_{S’S}} \)
- Acceleration: \( \mathrm{\vec{a}_{PS} = \vec{a}_{PS’}} \)
Key Idea: While position and velocity depend on the relative motion of frames, the acceleration of an object is the same in all inertial reference frames.
4. Vector Addition in Relative Motion:
The observed velocity is the vector sum of the object’s velocity relative to the moving frame and the velocity of that moving frame itself.
\( \mathrm{\vec{v}_{\text{object, ground}} = \vec{v}_{\text{object, train}} + \vec{v}_{\text{train, ground}}} \)
Note: If motion occurs in more than one dimension, this vector addition must be performed component-wise along each axis (x, y, z).
5. Acceleration Invariance:
For inertial frames:
\( \mathrm{\vec{a}_{PS} = \vec{a}_{PS’}} \)
This means that all observers in inertial frames agree on the acceleration of an object, since constant relative velocity between frames does not affect the rate of change of velocity.
| Quantity | Relation Between Frames | Frame Dependence |
|---|---|---|
| Position | \( \mathrm{\vec{r}_{PS} = \vec{r}_{PS’} + \vec{r}_{S’S}} \) | Frame-dependent |
| Velocity | \( \mathrm{\vec{v}_{PS} = \vec{v}_{PS’} + \vec{v}_{S’S}} \) | Frame-dependent |
| Acceleration | \( \mathrm{\vec{a}_{PS} = \vec{a}_{PS’}} \) | Frame-independent (same in all inertial frames) |
Example:
A river flows east at \( \mathrm{3 \, m/s} \). A swimmer moves relative to the water at \( \mathrm{2 \, m/s} \) north. Determine the swimmer’s velocity relative to the ground and its magnitude.
▶️ Answer / Explanation
Step 1: Identify known quantities.
- \( \mathrm{\vec{v}_{SW} = 2 \, \hat{j}} \) (swimmer relative to water)
- \( \mathrm{\vec{v}_{WG} = 3 \, \hat{i}} \) (water relative to ground)
Step 2: Use vector addition for relative motion.
\( \mathrm{\vec{v}_{SG} = \vec{v}_{SW} + \vec{v}_{WG}} \)
\( \mathrm{\vec{v}_{SG} = 3\hat{i} + 2\hat{j}} \)
Step 3: Find magnitude of resultant velocity.
\( \mathrm{|\vec{v}_{SG}| = \sqrt{3^2 + 2^2} = \sqrt{13} = 3.61 \, m/s} \)
Step 4: Find direction (angle north of east).
\( \mathrm{\theta = \tan^{-1}\left(\dfrac{2}{3}\right) = 33.7^\circ} \)