System Properties and Interactions
The properties of any system are determined by the interactions between the objects that make up that system. For instance, forces between particles, chemical bonds between atoms, or gravitational interactions between planets all define the system’s collective behavior.
- System behavior emerges from how internal components interact.
- Examples: tension between masses in a pulley system, electric forces between charges, etc.
Treating a System as a Single Object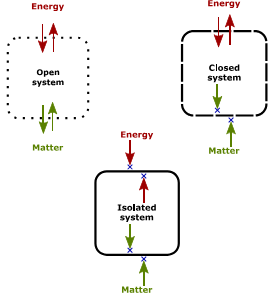
If the internal structure or interactions between parts of a system are not important for a given analysis, the entire system can be modeled as a single object. This simplification helps focus on external forces and overall motion without tracking internal details.
- Used when internal energy changes or stresses are negligible.
- Applicable in analyzing translational motion of rigid bodies, vehicles, or celestial objects.
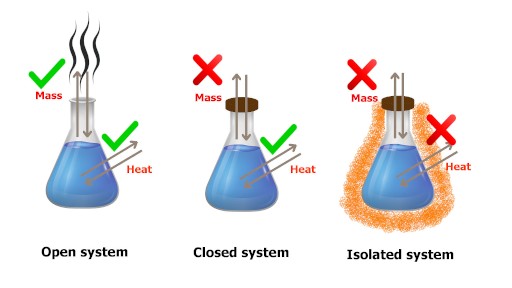
Interactions Between System and Environment
A system may allow energy or mass exchange with its surroundings. Such interactions occur when forces act across the system boundary or when particles cross it.
- Closed system: Energy can be exchanged, but not mass.
- Open system: Both energy and mass can be exchanged.
- Isolated system: Neither energy nor mass exchange occurs.
Behavior of Individual Objects Within a System
Individual objects within a system can behave differently from one another and from the system as a whole. The system’s motion represents the collective outcome of these individual motions.
- Each part may experience different accelerations or forces.
- The system’s center of mass can still move according to net external forces.
Effect of Internal Structure
The internal structure of a system influences how it responds to external forces or interactions. Systems with different internal configurations can have different mechanical, thermal, or dynamic properties even if their total mass is the same.
- Distribution of mass affects rotational inertia.
- Bond strength affects material stiffness or elasticity.
Changes in Substructure Due to External Conditions
When external conditions or variables such as temperature, pressure, or applied force change, the internal structure (substructure) of a system may also change, leading to new system properties.
- Heating can change internal molecular energy levels or cause phase changes.
- Pressure can alter density or crystalline structure in solids.
Example: System Properties from Interactions
A block of mass \( \mathrm{m} \) attached to a spring with constant \( \mathrm{k} \) oscillates on a frictionless surface.
▶️ Answer / Explanation
The system’s oscillatory behavior is determined by the internal interaction between the spring and the block — the restoring force \( \mathrm{F = -kx} \). This interaction defines system properties such as period \( \mathrm{T = 2\pi\sqrt{\tfrac{m}{k}}} \), amplitude, and frequency.
Example: Treating a System as a Single Object
A spacecraft with multiple internal components (engines, tanks, and electronics) is analyzed for its motion in space.
▶️ Answer / Explanation
For analyzing translational motion, all internal interactions are ignored, and the spacecraft is treated as a single rigid body with total mass \( \mathrm{M} \). The net external force \( \mathrm{\sum F_{ext} = M a_{cm}} \) determines the motion of the center of mass.
Example: Interaction Between System and Environment
Consider a hot cup of coffee left on a table in an open room.
▶️ Answer / Explanation
The coffee loses heat (energy) to the surrounding air via convection and radiation, and water molecules evaporate (mass transfer). Thus, it’s an open system that exchanges both energy and matter with the environment.
Example: Different Behavior of Individual Objects
Two blocks connected by a spring are placed on a frictionless surface and set into oscillation.
▶️ Answer / Explanation
Each block moves in opposite directions relative to the system’s center of mass, but the center of mass itself moves uniformly (if no external forces act). Hence, individual motion differs from that of the system as a whole.
Example: Internal Structure Affects System Behavior
Two spherical objects, one solid and one hollow, have the same mass and radius. Both roll down an inclined plane.
▶️ Answer / Explanation
The solid sphere reaches the bottom first because its rotational inertia \( \mathrm{I = \tfrac{2}{5}mR^2} \) is smaller than that of the hollow sphere \( \mathrm{I = \tfrac{2}{3}mR^2} \). Their internal mass distributions affect acceleration and energy distribution.
Example: Substructure Change Due to External Variables
A metal rod is heated from \( \mathrm{20^\circ C} \) to \( \mathrm{120^\circ C} \).
▶️ Answer / Explanation
As temperature increases, atomic vibrations intensify, and the average spacing between atoms expands. This results in an increase in length described by \( \mathrm{\Delta L = \alpha L_0 \Delta T} \). Thus, external heat changes the internal (atomic) structure of the system.
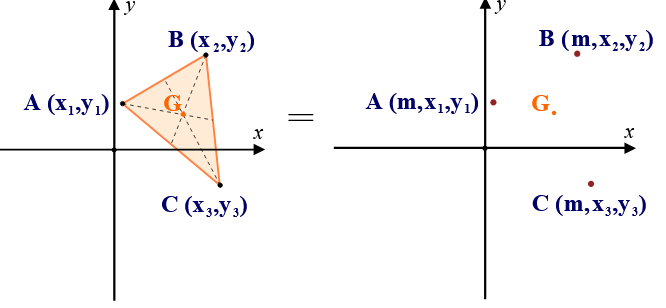
Center of Mass and Symmetry
For objects or systems with symmetrical mass distributions, the center of mass (COM) lies along the object’s lines of symmetry. If an object is uniform in mass density, its geometric center coincides with its center of mass.
- The COM is the average position of all the mass in the system.
- Symmetry helps locate the COM without calculation.
- If multiple axes of symmetry exist, the COM lies at their intersection.
Examples of symmetry placement:
- Uniform rod → COM at its midpoint.
- Uniform ring or disk → COM at the geometric center.
- Sphere → COM at the center.
Example
Locate the center of mass of a uniform rectangular plate measuring \( \mathrm{4\,m \times 2\,m} \).
▶️ Answer / Explanation
The plate has uniform mass distribution and symmetry about its length and width midlines. Therefore, the COM is at the intersection of these lines — the geometric center.
\( \mathrm{x_{cm} = 2.0\,m,\quad y_{cm} = 1.0\,m.} \)
Result: COM lies at the center of the rectangle.
Calculating the Center of Mass
When the distribution of mass is not uniform or consists of discrete parts, the center of mass can be calculated along a given axis using the weighted average of the positions of individual masses.
Relevant Equations:
\( \mathrm{x_{cm} = \dfrac{\sum m_i x_i}{\sum m_i}} \)
\( \mathrm{y_{cm} = \dfrac{\sum m_i y_i}{\sum m_i}} \)
- \( \mathrm{m_i} \): mass of the \( \mathrm{i^{th}} \) object
- \( \mathrm{x_i, y_i} \): coordinates of each object
- \( \mathrm{x_{cm}, y_{cm}} \): coordinates of the system’s center of mass
Example
Two point masses \( \mathrm{m_1 = 3\,kg} \) and \( \mathrm{m_2 = 5\,kg} \) are placed at positions \( \mathrm{x_1 = 0\,m} \) and \( \mathrm{x_2 = 4\,m.} \) Find the position of the center of mass.
▶️ Answer / Explanation
Step 1: Use the COM formula:
\( \mathrm{x_{cm} = \dfrac{m_1 x_1 + m_2 x_2}{m_1 + m_2}} \)
Step 2: Substitute values:
\( \mathrm{x_{cm} = \dfrac{(3)(0) + (5)(4)}{3 + 5} = \dfrac{20}{8} = 2.5\,m.} \)
Result: The center of mass lies \( \mathrm{2.5\,m} \) from the position of the first mass, closer to the heavier one.
Center of Mass for a Nonuniform Solid
For nonuniform or continuously distributed systems, the center of mass is calculated using integration over differential mass elements \( \mathrm{dm} \). Each infinitesimal element contributes proportionally to its position and mass.
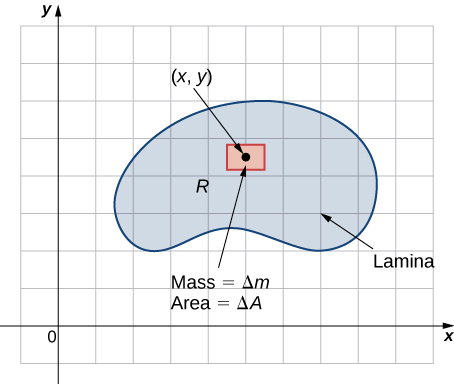
Relevant Equation:
\( \mathrm{\vec{r}_{cm} = \dfrac{\displaystyle\int \vec{r}\,dm}{\displaystyle\int dm}} \)
- \( \mathrm{\vec{r}_{cm}} \): position vector of the center of mass
- \( \mathrm{r} \): position of the differential element
- \( \mathrm{dm} \): infinitesimal mass element of the body
This approach generalizes the discrete form \( \mathrm{x_{cm} = \dfrac{\sum m_i x_i}{\sum m_i}} \) to continuous mass distributions.
Example
Find the center of mass of a thin nonuniform rod of length \( \mathrm{L} \) whose linear mass density varies as \( \mathrm{\lambda(x) = \lambda_0 x} \).
▶️ Answer / Explanation
Step 1: Express the differential mass element:
\( \mathrm{dm = \lambda(x)\,dx = \lambda_0 x\,dx} \)
Step 2: Center of mass formula:
\( \mathrm{x_{cm} = \dfrac{\int_0^L x\,dm}{\int_0^L dm} = \dfrac{\int_0^L x(\lambda_0 x)\,dx}{\int_0^L \lambda_0 x\,dx}} \)
Step 3: Evaluate the integrals:
\( \mathrm{x_{cm} = \dfrac{\lambda_0 \int_0^L x^2 dx}{\lambda_0 \int_0^L x\,dx} = \dfrac{\tfrac{L^3}{3}}{\tfrac{L^2}{2}} = \dfrac{2L}{3}} \)
Result: The center of mass is located at \( \mathrm{x_{cm} = \dfrac{2L}{3}} \) from the lighter end of the rod.
Linear Mass Density
For one-dimensional bodies such as rods or wires, the linear mass density \( \mathrm{\lambda} \) is defined as the rate of change of mass with respect to position along the body.
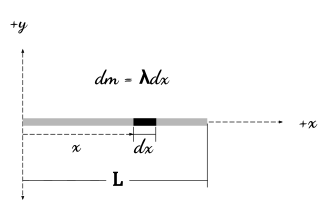
Relevant Equation:
\( \mathrm{\lambda = \dfrac{dm}{d\ell}} \)
- \( \mathrm{\lambda} \): mass per unit length (kg/m)
- \( \mathrm{dm} \): infinitesimal mass of segment
- \( \mathrm{d\ell} \): infinitesimal length of segment
Key Idea: If \( \mathrm{\lambda} \) varies with position, then total mass must be found by integration.
Example
A wire has a mass distribution given by \( \mathrm{\lambda(x) = 2x} \) (in kg/m) along its 3 m length. Find its total mass.
▶️ Answer / Explanation
Step 1: Total mass is found by integration:
\( \mathrm{M = \int_0^3 \lambda(x)\,dx = \int_0^3 2x\,dx = [x^2]_0^3 = 9\,kg.} \)
Result: The total mass of the wire is \( \mathrm{9\,kg.} \)
Mass from Density Functions
If a body’s mass density function is known, its total mass can be determined by integrating the density over the body’s volume, area, or length — depending on dimensionality.
Relevant Equations:
- 1D (Linear): \( \mathrm{M = \int \lambda(x)\,dx} \)
- 2D (Areal): \( \mathrm{M = \int \sigma(x,y)\,dA} \)
- 3D (Volumetric): \( \mathrm{M = \int \rho(x,y,z)\,dV} \)
Here \( \mathrm{\rho(x,y,z)} \) is the volume mass density (kg/m³).
Example
A solid sphere has a radially varying density \( \mathrm{\rho(r) = \rho_0(1 – \tfrac{r}{R})} \), where \( \mathrm{R} \) is the sphere’s radius. Find an expression for the total mass of the sphere.
▶️ Answer / Explanation
Step 1: Write total mass integral in spherical coordinates:
\( \mathrm{M = \int_0^R \rho(r)\,4\pi r^2\,dr = 4\pi\int_0^R \rho_0(1 – \tfrac{r}{R})r^2\,dr} \)
Step 2: Simplify and integrate:
\( \mathrm{M = 4\pi\rho_0\left[\dfrac{r^3}{3} – \dfrac{r^4}{4R}\right]_0^R = 4\pi\rho_0 R^3\left(\dfrac{1}{3} – \dfrac{1}{4}\right) = \dfrac{\pi\rho_0 R^3}{3}.} \)
Result: The total mass of the sphere is \( \mathrm{M = \dfrac{\pi\rho_0 R^3}{3}}. \)
Modeling a System as a Singular Object at Its Center of Mass
A complex system of particles or extended bodies can be modeled as a single object whose entire mass is concentrated at the center of mass (COM). This simplification allows analysis of the system’s translational motion without considering internal motion or structure.
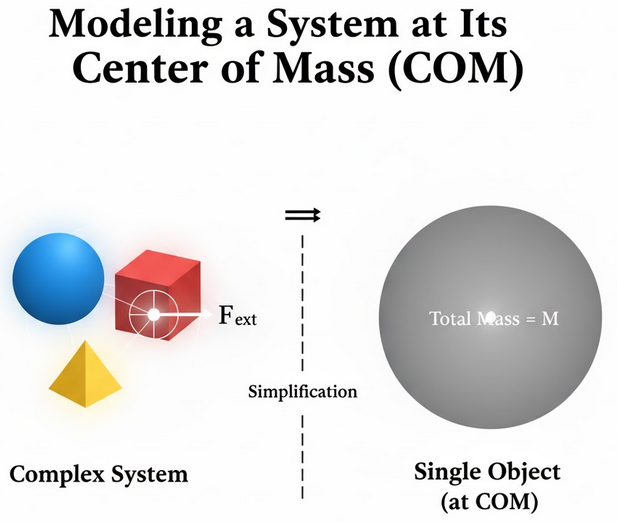
- The net external force on the system determines the acceleration of its center of mass: \( \mathrm{\sum \vec{F}_{ext} = M \vec{a}_{cm}} \).
- Internal forces between parts of the system cancel in pairs and do not affect overall motion.
- This approximation is valid when analyzing translational motion or projectile trajectories.
Example
Explain why analyzing the motion of a thrown baseball, all internal structures (threads, air inside) are ignored, and the baseball is treated as a single particle located at its center of mass.
▶️ Answer / Explanation
The external forces—gravity and air resistance—act as if they were applied at the COM. Thus, the ball’s parabolic motion can be described by \( \mathrm{\sum \vec{F}_{ext} = M \vec{a}_{cm}} \), without tracking internal forces or rotations.