Rotation Matrix in \( \mathbb{R}^2 \)
The matrix
\( \begin{pmatrix} \cos \theta & -\sin \theta \\ \sin \theta & \cos \theta \end{pmatrix} \)
is associated with a linear transformation that rotates every vector in \( \mathbb{R}^2 \) by an angle \( \theta \) counterclockwise about the origin.
If a vector \( \mathbf{v} = \begin{pmatrix} x \\ y \end{pmatrix} \), then applying the rotation matrix gives
\( \begin{pmatrix} \cos \theta & -\sin \theta \\ \sin \theta & \cos \theta \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix} = \begin{pmatrix} x\cos \theta – y\sin \theta \\ x\sin \theta + y\cos \theta \end{pmatrix} \)
This transformation preserves both the length of vectors and the angles between vectors, changing only their direction.

Special cases include:
\( \theta = 0 \): identity transformation
\( \theta = \dfrac{\pi}{2} \): rotation by 90° counterclockwise
\( \theta = \pi \): rotation by 180°
Example:
Rotate the vector \( (1, 0) \) by an angle \( \theta = \dfrac{\pi}{2} \) counterclockwise.
▶️ Answer/Explanation
For \( \theta = \dfrac{\pi}{2} \),
\( \cos \dfrac{\pi}{2} = 0 \), \( \sin \dfrac{\pi}{2} = 1 \)
Apply the rotation matrix:
\( \begin{pmatrix} 0 & -1 \\ 1 & 0 \end{pmatrix} \begin{pmatrix} 1 \\ 0 \end{pmatrix} = \begin{pmatrix} 0 \\ 1 \end{pmatrix} \)
Conclusion: The vector \( (1,0) \) is rotated to \( (0,1) \).
Example:
Find the image of the vector \( (2, 1) \) under a rotation of \( \theta = \pi \).
▶️ Answer/Explanation
For \( \theta = \pi \),
\( \cos \pi = -1 \), \( \sin \pi = 0 \)
Apply the rotation matrix:
\( \begin{pmatrix} -1 & 0 \\ 0 & -1 \end{pmatrix} \begin{pmatrix} 2 \\ 1 \end{pmatrix} = \begin{pmatrix} -2 \\ -1 \end{pmatrix} \)
Conclusion: A rotation by \( \pi \) maps \( (2,1) \) to \( (-2,-1) \).
Determinant and Area Scaling in Linear Transformations
For a linear transformation in \( \mathbb{R}^2 \) represented by a \( 2 \times 2 \) matrix \( A \), the absolute value of the determinant of \( A \) describes how areas change under the transformation.
Specifically,
\( |\det(A)| \)
gives the magnitude of the dilation of regions in \( \mathbb{R}^2 \).
This means that if a region in the plane has area \( S \), then after applying the transformation, the area becomes

\( |\det(A)| \cdot S \)
- If \( |\det(A)| > 1 \), areas are enlarged.
- If \( 0 < |\det(A)| < 1 \), areas are reduced.
- If \( |\det(A)| = 1 \), areas are preserved.
- If \( \det(A) = 0 \), all regions collapse to zero area.
Example:
Consider the transformation represented by
\( A = \begin{pmatrix} 2 & 0 \\ 0 & 3 \end{pmatrix} \)
Find the area scaling factor.
▶️ Answer/Explanation
Compute the determinant:
\( \det(A) = (2)(3) – (0)(0) = 6 \)
The absolute value is 6.
Conclusion: All regions have their area multiplied by a factor of 6.
Example:
A transformation preserves area. What must be true about the determinant?
▶️ Answer/Explanation
If areas are preserved, the scaling factor is 1.
Therefore,
\( |\det(A)| = 1 \)
Conclusion: The determinant must have absolute value 1.
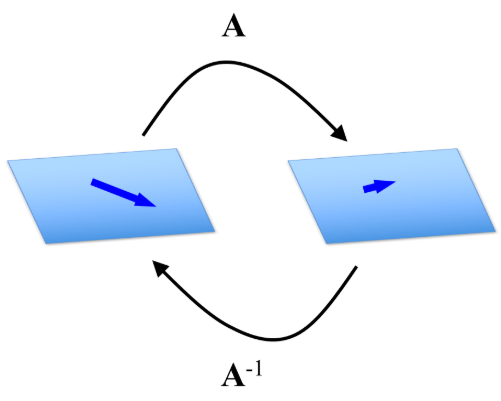
Inverse of a Linear Transformation
Let \( L \) be a linear transformation from \( \mathbb{R}^2 \) to \( \mathbb{R}^2 \) defined by
\( L(\mathbf{v}) = A\mathbf{v} \)
where \( A \) is a \( 2 \times 2 \) matrix.
If the matrix \( A \) is invertible, meaning
\( \det(A) \ne 0 \)
then the linear transformation \( L \) has an inverse transformation, denoted \( L^{-1} \).
The inverse transformation is given by
\( L^{-1}(\mathbf{v}) = A^{-1}\mathbf{v} \)
Applying \( L^{-1} \) reverses the effect of \( L \).
That is, for all vectors \( \mathbf{v} \in \mathbb{R}^2 \),
\( L^{-1}(L(\mathbf{v})) = \mathbf{v} \quad \text{and} \quad L(L^{-1}(\mathbf{v})) = \mathbf{v} \)
Thus, the inverse matrix represents the transformation that undoes the original transformation.
Example:
Let
\( A = \begin{pmatrix} 2 & 1 \\ 1 & 1 \end{pmatrix} \)
Find the inverse transformation.
▶️ Answer/Explanation
First compute the determinant:
\( \det(A) = (2)(1) – (1)(1) = 1 \ne 0 \)
So \( A \) is invertible. The inverse is
\( A^{-1} = \begin{pmatrix} 1 & -1 \\ -1 & 2 \end{pmatrix} \)
Conclusion: The inverse transformation is \( L^{-1}(\mathbf{v}) = A^{-1}\mathbf{v} \).
Example:
Explain why a linear transformation with determinant zero has no inverse.
▶️ Answer/Explanation
If \( \det(A) = 0 \), then \( A^{-1} \) does not exist.
Geometrically, the transformation collapses the plane into a line or a point, so the original vectors cannot be uniquely recovered.
Conclusion: Only linear transformations with nonzero determinant have inverses.