Principle of Moments
The principle of moments states that for a body in rotational equilibrium, the sum of the clockwise moments about any point is equal to the sum of the anticlockwise moments about the same point.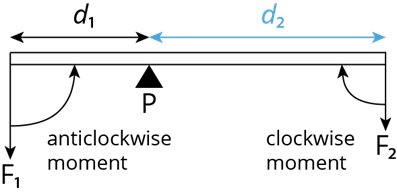
\( \mathrm{\sum M_{clockwise} = \sum M_{anticlockwise}} \)
Explanation:
- This condition ensures that there is no resultant moment acting on the body, so it does not rotate.
- If the clockwise and anticlockwise moments are not equal, the body experiences a net torque and begins to rotate.
- The principle applies to any rigid body that can rotate freely about a pivot or axis.
Unit: newton–metre (N·m)
Applications:
- Balancing beams and levers.
- Determining unknown forces using see-saws or metre rules.
- Design of weighing scales and bridges.
Example
A uniform metre rule is pivoted at its midpoint. A \( \mathrm{0.3\,N} \) weight is hung at the 20 cm mark. At what position must a \( \mathrm{0.2\,N} \) weight be placed on the other side to balance the rule?
▶️ Answer / Explanation
Taking moments about the pivot (50 cm mark):
Anticlockwise moment = Clockwise moment
\( \mathrm{(0.2)(x – 50) = (0.3)(50 – 20)} \)
\( \mathrm{0.2(x – 50) = 9.0} \)
\( \mathrm{x – 50 = 45 \Rightarrow x = 95\,cm.} \)
The \( \mathrm{0.2\,N} \) weight must be placed at the 95 cm mark to balance the rule.
Conditions for Equilibrium
A body is said to be in equilibrium when there is no tendency for it to move or rotate — i.e., it remains at rest or continues to move with constant velocity.
For complete equilibrium: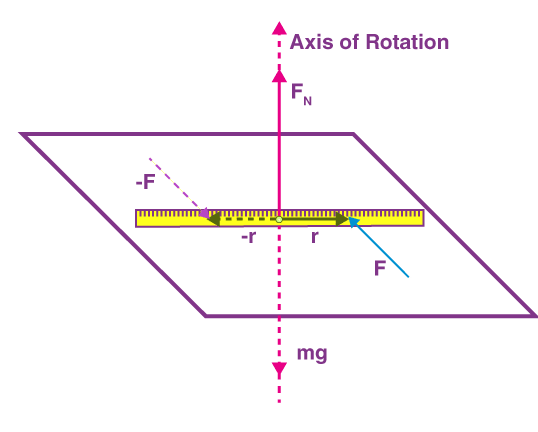
- No resultant force: ensures no linear (translational) motion.
- No resultant moment (torque): ensures no rotational motion.
Mathematical Conditions:
\( \mathrm{\sum \vec{F} = 0} \) → no resultant (translational) force
\( \mathrm{\sum M = 0} \) → no resultant moment (rotational equilibrium)
Explanation:
- When these two conditions are satisfied simultaneously, the object remains in static or dynamic equilibrium.
- If either condition is not met, the body will accelerate linearly or rotate, respectively.
Examples of Equilibrium Situations:
- A book resting on a table (no resultant force; no torque).
- A balanced see-saw (moments on each side are equal).
- A hanging lamp supported symmetrically by two strings.
Example
A uniform beam is supported at its ends and has a 100 N load at its centre. Each support exerts an upward force \( \mathrm{F.} \) Find \( \mathrm{F.} \)
▶️ Answer / Explanation
Since the beam is in equilibrium:
1️. No resultant vertical force:
\( \mathrm{2F = 100 \Rightarrow F = 50\,N.} \)
2️. No resultant moment (symmetrical loading ensures torques cancel). Thus, each support provides an equal upward force of \( \mathrm{50\,N.} \)
Vector Representation of Coplanar Forces in Equilibrium
When three coplanar forces acting on a body are in equilibrium, they can be represented in magnitude and direction by the three sides of a closed triangle drawn to scale.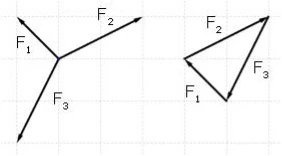
Explanation:
- For a body in equilibrium under three coplanar forces, the vector sum of the forces must be zero: \( \mathrm{\vec{F_1} + \vec{F_2} + \vec{F_3} = 0.} \)
- This means that when the three forces are drawn tip-to-tail, they form a closed triangle known as the triangle of forces.
- The direction of each force corresponds to the direction of each side of the triangle.
Triangle of Forces Rule:
- If three forces acting at a point are in equilibrium, they can be represented in magnitude and direction by the sides of a triangle taken in order.
- Conversely, if the forces can be represented by a closed triangle, they are in equilibrium.
Graphical Representation (Conceptual):
- Draw the first force to scale in its direction.
- From its head, draw the second force to scale in its direction.
- Complete the triangle with the third force; the triangle closes only when the three forces are in equilibrium.
Example
A traffic light of weight \( \mathrm{80\,N} \) hangs from a junction where two cables support it symmetrically, each making an angle of \( \mathrm{30^\circ} \) to the horizontal. Find the tension in each cable.
▶️ Answer / Explanation
In equilibrium, vertical forces balance:
\( \mathrm{2T\sin30^\circ = 80 \Rightarrow T = 80.} \)
Hence, tension in each cable = \( \mathrm{80\,N.} \)
The horizontal components of tension cancel out, confirming equilibrium. If represented vectorially, the two tension forces and the weight form a closed triangle.