Concept of a Vector
A vector is a quantity that has both magnitude (size) and direction. Vectors are represented graphically by arrows where:
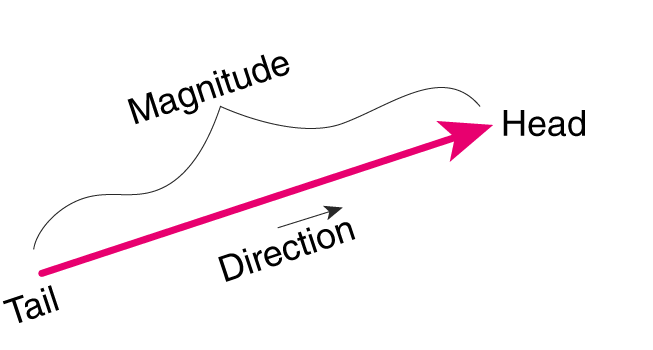
- The length of the arrow corresponds to the magnitude.
- The direction of the arrow indicates the direction of the vector.
Examples of vector quantities: displacement, velocity, acceleration, force.
Position Vectors
A position vector specifies the position of a point relative to the origin of a coordinate system.
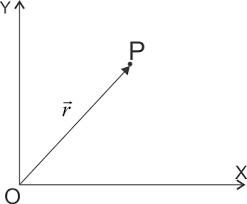
- In 2D: \( \vec{r} = \begin{pmatrix} x \\ y \end{pmatrix} \)
- In 3D: \( \vec{r} = \begin{pmatrix} x \\ y \\ z \end{pmatrix} \)
It tells how far and in what direction the point is from the origin.
Displacement Vectors
A displacement vector represents the change in position from one point to another:
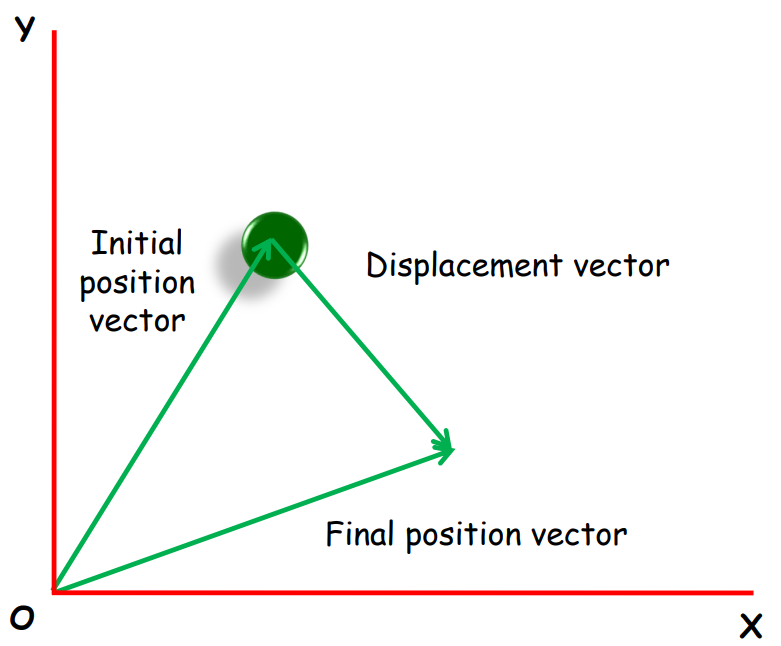
\( \vec{d} = \vec{r}_2 – \vec{r}_1 \)
- \( \vec{r}_1 \): position vector of initial point
- \( \vec{r}_2 \): position vector of final point
The displacement vector shows both the distance and direction from the starting point to the endpoint.
Example :
Write the position vector of point P(3, 4).
▶️ Answer/Explanation
\( \overrightarrow{OP} = \begin{pmatrix}3 \\ 4\end{pmatrix} \)
Example :
Find the displacement vector from A(1,2) to B(4,6).
▶️Answer/Explanation
\( \overrightarrow{AB} = \overrightarrow{OB} – \overrightarrow{OA} = \begin{pmatrix}4 – 1 \\ 6 – 2\end{pmatrix} = \begin{pmatrix}3 \\ 4\end{pmatrix} \)
Representation of Vectors Using Directed Line Segments
A vector can be represented geometrically by a directed line segment. A directed line segment is drawn as an arrow from one point to another.
- The tail (or initial point) of the vector is where the arrow starts.
- The head (or terminal point) of the vector is where the arrow points to.
- The length of the segment represents the magnitude of the vector.
- The arrowhead indicates the direction of the vector.
For example, if a vector starts at point \( A \) and ends at point \( B \), it is denoted as:
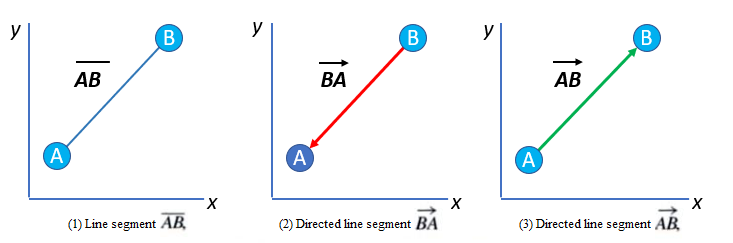
\( \overrightarrow{AB} \)
The vector \( \overrightarrow{AB} \) has:
- Magnitude: equal to the distance between \( A \) and \( B \).
- Direction: from \( A \) towards \( B \).
Directed line segments can represent vectors anywhere in space. Vectors with the same magnitude and direction are equal, even if their initial points differ (they are free vectors).
Example :
Find the vector representing the directed line segment from A(1,2) to B(4,7).
▶️ Answer/Explanation
\( \overrightarrow{AB} = \overrightarrow{OB} – \overrightarrow{OA} = (4-1)\mathbf{i} + (7-2)\mathbf{j} \)
\( \overrightarrow{AB} = 3\mathbf{i} + 5\mathbf{j} \)
Conclusion: The directed line segment AB is \( 3\mathbf{i} + 5\mathbf{j} \).
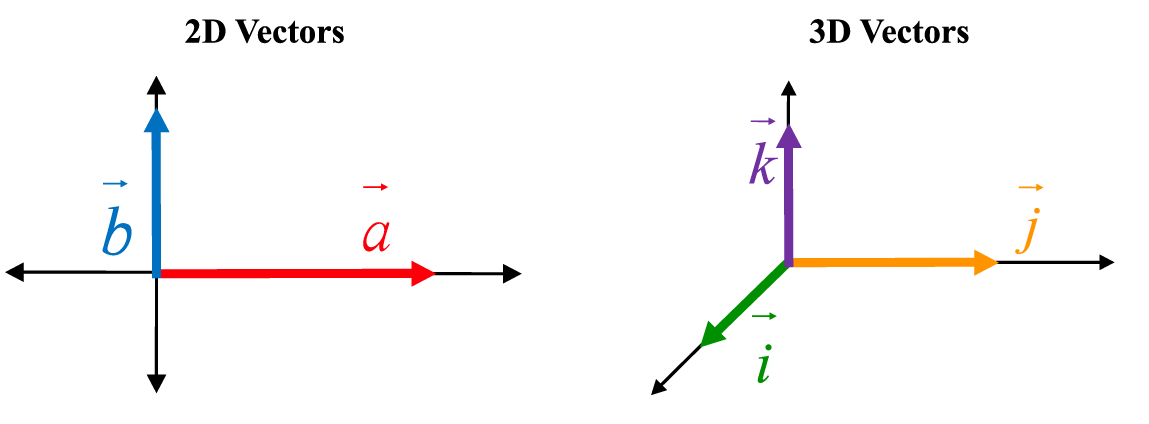
Base Vectors \( \mathbf{i}, \mathbf{j}, \mathbf{k} \)
In 2D or 3D Cartesian coordinate systems, vectors can be expressed using base vectors:
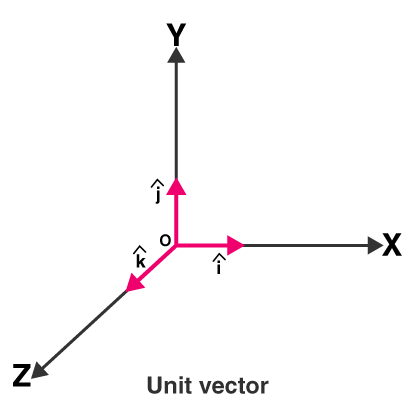
- \( \mathbf{i} \): unit vector in the x-direction
- \( \mathbf{j} \): unit vector in the y-direction
- \( \mathbf{k} \): unit vector in the z-direction (only for 3D)
Each base vector has a magnitude of 1 and points along its respective axis.
Components of a Vector
Any vector can be written as a combination of its components along the coordinate axes:
- In 2D: \( \mathbf{v} = v_x \mathbf{i} + v_y \mathbf{j} \)
- In 3D: \( \mathbf{v} = v_x \mathbf{i} + v_y \mathbf{j} + v_z \mathbf{k} \)
where:
- \( v_x, v_y, v_z \) are the scalar components of \( \mathbf{v} \) in x, y, z directions respectively.
The magnitude of \( \mathbf{v} \) is given by:
- 2D: \( |\mathbf{v}| = \sqrt{v_x^2 + v_y^2} \)
- 3D: \( |\mathbf{v}| = \sqrt{v_x^2 + v_y^2 + v_z^2} \)
Example :
Express the vector from the origin O(0,0) to point P(5, -3) in terms of i and j.
▶️ Answer/Explanation
The position vector of P is:
\( \overrightarrow{OP} = 5 \mathbf{i} – 3 \mathbf{j} \)
Conclusion: The vector is \( 5\mathbf{i} – 3\mathbf{j} \).