Types of Relationships Between Two Lines in Space
When analyzing two lines in 2D or 3D, they can relate to each other in the following ways:
| Characteristics | What You Draw | What You Say | What You Write |
|---|---|---|---|
| Parallel lines never cross and stay the same distance apart. They are coplanar. They have 0 points in common. | 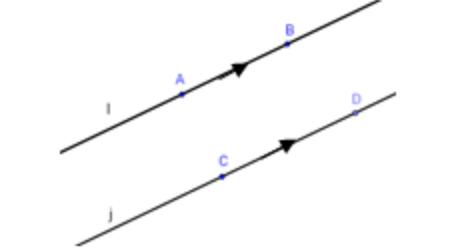 | Line AB is parallel to line CD or line l is parallel to line j | AB ⇄ CD or line l ⇄ line j |
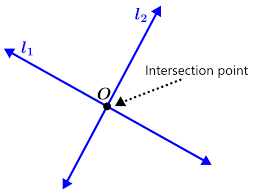
| Intersecting lines pass through the same point. They have one point in common. | 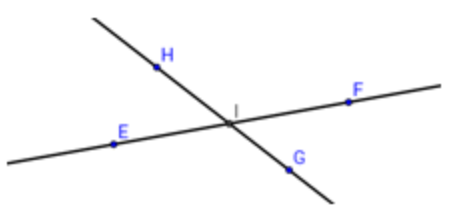 | Lines HG and EF intersect at point I. | HG intersects EF (There is no symbol for intersection of lines.) |
| Perpendicular lines intersect at right angles. They have one point in common. | 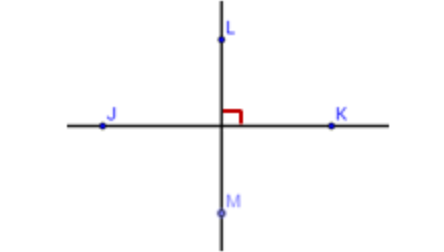 | Line LM is perpendicular to line JK. | LM ⊥ JK |
| Coincident lines are the same line. They have an infinite number of points in common. | 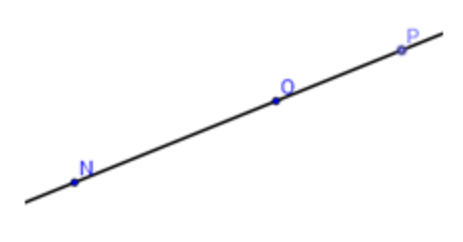 | Line NO and line OP are coincident lines. | (There is no symbol for coincident lines.) |
| Skew lines are lines that are non-coplanar and never intersect. They have 0 points in common. | 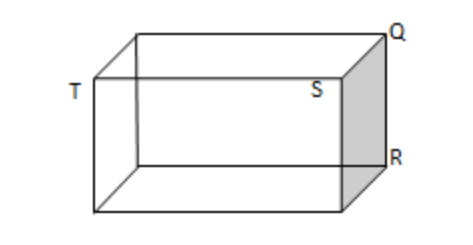 | Line TS and line QR are skew lines. | TS and QR are skew. (There is no symbol for skew lines.) |
Example
Determine the relationship between the following two lines:
Line 1: \( \mathbf{r}_1 = \begin{pmatrix} 1 \\ 2 \\ 3 \end{pmatrix} + \lambda \begin{pmatrix} 2 \\ -1 \\ 4 \end{pmatrix} \)
Line 2: \( \mathbf{r}_2 = \begin{pmatrix} 3 \\ 0 \\ 1 \end{pmatrix} + \mu \begin{pmatrix} 2 \\ -1 \\ 4 \end{pmatrix} \)
▶️Answer/Explanation
Direction vectors are the same: \( \begin{pmatrix} 2 \\ -1 \\ 4 \end{pmatrix} \). So the lines are parallel or coincident.
Check if one point lies on the other line:
Test if \( \begin{pmatrix} 3 \\ 0 \\ 1 \end{pmatrix} \) lies on Line 1:
Solve:
\( 1 + 2\lambda = 3 \Rightarrow \lambda = 1 \)
\( 2 – 1 \cdot 1 = 2 – 1 = 1 \) → does not match 0
Therefore, lines are parallel but not coincident.
Example
Determine the relationship between these lines:
Line 1: \( \mathbf{r}_1 = \begin{pmatrix} 0 \\ 0 \\ 0 \end{pmatrix} + \lambda \begin{pmatrix} 1 \\ 1 \\ 1 \end{pmatrix} \)
Line 2: \( \mathbf{r}_2 = \begin{pmatrix} 1 \\ 0 \\ 0 \end{pmatrix} + \mu \begin{pmatrix} 0 \\ 1 \\ -1 \end{pmatrix} \)
▶️ Answer/Explanation
The direction vectors are not proportional → Not parallel.
Attempt to solve for \( \lambda, \mu \) where lines intersect:
Set:
\( \begin{pmatrix} 0 + \lambda \\ 0 + \lambda \\ 0 + \lambda \end{pmatrix} = \begin{pmatrix} 1 + 0 \mu \\ 0 + 1 \mu \\ 0 – 1 \mu \end{pmatrix} \)
Leads to contradiction → No solution.
Therefore, lines are skew.
Points of Intersection of Lines
To find the point of intersection of two lines:
- Write their vector equations or parametric equations.
- Set the equations equal and solve for the parameters.
- Substitute back to find the point of intersection (if any).
- If no common solution exists, the lines do not intersect (they are either parallel or skew).
Example
Find the point of intersection (if any) of the following lines:
Line 1: \( \mathbf{r}_1 = \begin{pmatrix} 1 \\ 2 \\ 3 \end{pmatrix} + \lambda \begin{pmatrix} 2 \\ 1 \\ -1 \end{pmatrix} \)
Line 2: \( \mathbf{r}_2 = \begin{pmatrix} 3 \\ 0 \\ 4 \end{pmatrix} + \mu \begin{pmatrix} -1 \\ 2 \\ -2 \end{pmatrix} \)
▶️ Answer/Explanation
Set components equal:
\( 1 + 2\lambda = 3 – \mu \) → (1)
\( 2 + \lambda = 0 + 2\mu \) → (2)
\( 3 – \lambda = 4 – 2\mu \) → (3)
From (1): \( 2\lambda + \mu = 2 \)
From (2): \( \lambda – 2\mu = -2 \)
From (3): \( -\lambda + 2\mu = 1 \)
Solving (2) and (3):
Add: \( 0 = -1 \) → Contradiction
No point of intersection. The lines are skew.