Plane Equation Using a Normal Vector
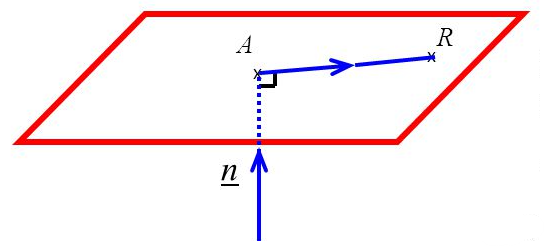
If \( \mathbf{n} \) is a normal vector to the plane, and \( \mathbf{a} \) is the position vector of a point on the plane, then the plane’s equation can be written as:
\( \mathbf{r} \cdot \mathbf{n} = \mathbf{a} \cdot \mathbf{n} \)
- \( \mathbf{r} \): position vector of any point \( (x, y, z) \) on the plane
- \( \mathbf{a} \): position vector of a fixed point on the plane
- \( \mathbf{n} \): normal vector to the plane
Interpretation: This equation states that any point \( \mathbf{r} \) on the plane satisfies the condition that the dot product of its position vector with the normal vector is constant (equal to \( \mathbf{a} \cdot \mathbf{n} \)).
Example
Find the plane equation passing through point \( \mathbf{a} = \begin{pmatrix} 1 \\ 2 \\ 3 \end{pmatrix} \) with normal vector \( \mathbf{n} = \begin{pmatrix} 2 \\ -1 \\ 4 \end{pmatrix} \).
▶️ Answer/Explanation
First compute \( \mathbf{a} \cdot \mathbf{n} \):
\( (1)(2) + (2)(-1) + (3)(4) = 2 – 2 + 12 = 12 \)
So the plane equation is:
\( \mathbf{r} \cdot \begin{pmatrix} 2 \\ -1 \\ 4 \end{pmatrix} = 12 \)
Cartesian Equation of a Plane
The equation of a plane in Cartesian form is:
\( ax + by + cz = d \)
- \( (x, y, z) \) — coordinates of any point on the plane
- \( (a, b, c) \) — components of a normal vector to the plane
- \( d \) — a constant determined by substituting a known point on the plane
Interpretation: The plane consists of all points \( (x, y, z) \) whose position vectors satisfy this linear equation.
Example
Find the Cartesian equation of the plane that passes through the point \( (1, 2, -1) \) and has normal vector \( \mathbf{n} = \begin{pmatrix} 3 \\ -2 \\ 4 \end{pmatrix} \).
▶️ Answer/Explanation
We use the formula \( 3(x – 1) – 2(y – 2) + 4(z + 1) = 0 \)
\( 3x – 3 – 2y + 4 + 4z + 4 = 0 \)
\( 3x – 2y + 4z + 5 = 0 \)
So the Cartesian equation of the plane is:
\( 3x – 2y + 4z = -5 \)
Summary : Vector and Cartesian Equations
| Vector Equation | Cartesian Equation |
|---|---|
| \( \vec{r} \cdot \vec{n} = d \) | \( lx + ny + nz = d \) |
| \( (\vec{r} – \vec{a}) \cdot \vec{N} = 0 \) | \( A(x – x_1) + B(y – y_1) + C(z – z_1) = 0 \) |
| \( (\vec{r} – \vec{a}) \cdot [(\vec{b} – \vec{a}) \times (\vec{c} – \vec{a})] = 0 \) | \[ \begin{vmatrix} x – x_1 & y – y_1 & z – z_1 \\ x_2 – x_1 & y_2 – y_1 & z_2 – z_1 \\ x_3 – x_1 & y_3 – y_1 & z_3 – z_1 \end{vmatrix} = 0 \] |
| \( \vec{r} = (\vec{n}_1 + \lambda \vec{n}_2) = d_1 + \lambda d_2 \) | \( (A_1x + B_1y + C_1z – d_1) + \lambda(A_2x + B_2y + C_2z – d_2) = 0 \) |