Physical Phenomena Modeled by Second-Order DEs
Many physical systems are naturally modeled by second-order differential equations. Examples include:
- Spring-Mass-Damper Systems: \( m\frac{d^2x}{dt^2} + c\frac{dx}{dt} + kx = 0 \)
- Free Fall with Air Resistance: \( m\frac{dv}{dt} = mg – kv^2 \)
- Simple Pendulum: \( \frac{d^2\theta}{dt^2} + \frac{g}{L} \sin(\theta) = 0 \)
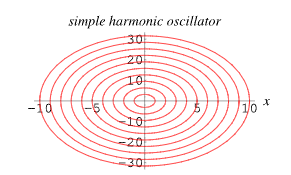
Example A mass-spring system is modeled by \( \frac{d^2x}{dt^2} + 4x = 0 \). Describe the motion and write the first-order system. ▶️Answer/ExplanationLet \( x_1 = x \), \( x_2 = \frac{dx}{dt} \). Then: $ \frac{dx_1}{dt} = x_2, \quad \frac{dx_2}{dt} = -4x_1 $This describes a harmonic oscillator with periodic oscillations about the equilibrium point. |
Phase Portraits and Second-Order Differential Equations
Solutions of second-order differential equations of the form: $ \frac{d^2x}{dt^2} + a \frac{dx}{dt} + b x = 0$ can be investigated using the phase portrait method .
Converting to First-Order System
Define:
- \( x_1 = x \)
- \( x_2 = \frac{dx}{dt} \)
Then the system becomes: $ \begin{cases} \frac{dx_1}{dt} = x_2 \\ \frac{dx_2}{dt} = -a x_2 – b x_1 \end{cases}$
Analyzing the Phase Portrait
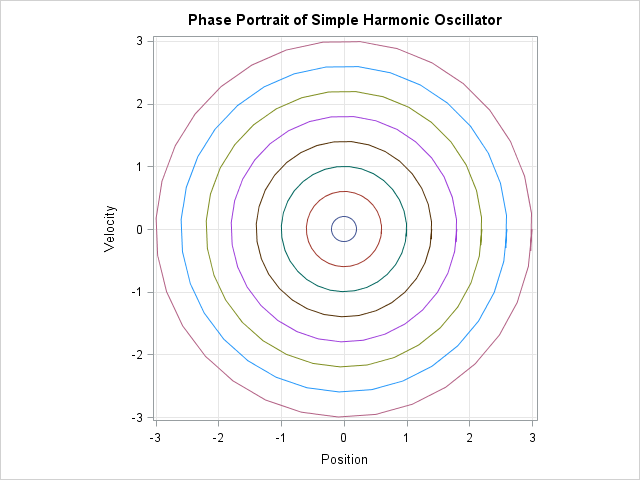
The phase portrait is a plot of \( x_2 \) (velocity) vs. \( x_1 \) (displacement), and shows the trajectory of the system in phase space. Key behaviors based on values of \( a \) and \( b \):
- Underdamped Oscillation: Spiral toward equilibrium (complex roots, Re < 0)
- Overdamped Motion: Smooth return to equilibrium (real negative roots)
- Critically Damped: Fastest return without oscillation
- Unstable Motion: Spiral out or diverging lines (Re > 0)
Why It Matters
Phase portraits provide a powerful visual tool to understand:
- Stability of equilibrium points
- Oscillations and damping behavior
- Long-term system dynamics without solving equations analytically
Example Analyze the phase portrait of the system: \( \frac{dx_1}{dt} = x_2 \), \( \frac{dx_2}{dt} = -x_1 \). ▶️Answer/ExplanationThis system represents a simple harmonic oscillator. The phase portrait consists of closed elliptical orbits around the origin.
The equilibrium at the origin is a center (neutrally stable). Note: Solutions of \( \frac{d^2x}{dt^2} + a\frac{dx}{dt} + b = 0 \) can also be investigated by phase portraits as covered in AHL 5.17. |